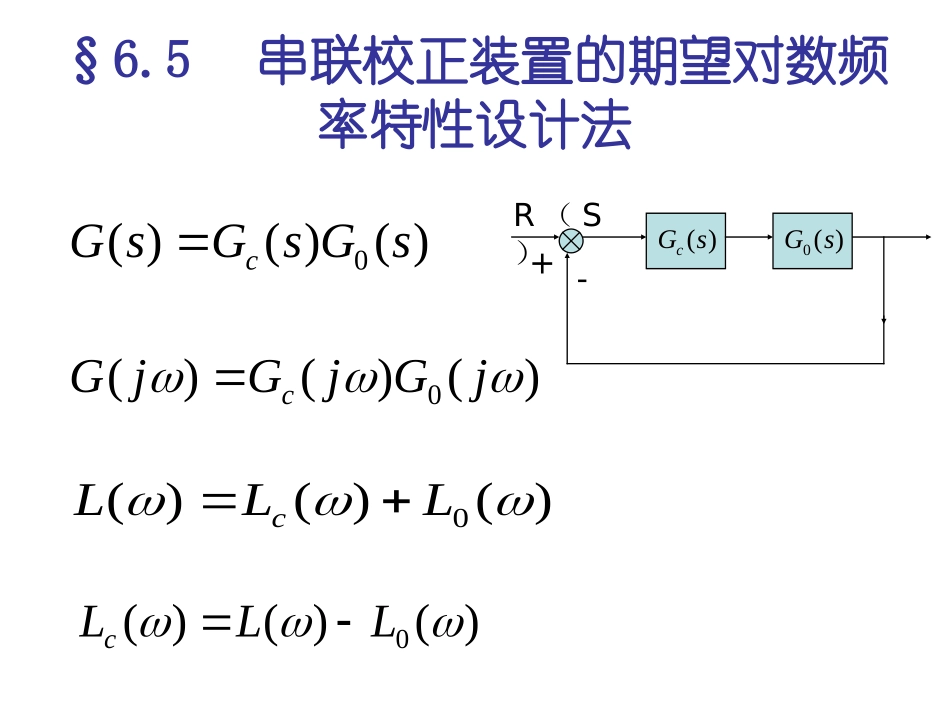
5串联校正装置的期望对数频率特性设计法)()()(0jGjGjGc()cGs0()Gs+-R(S)0()()()cGsGsGs)()()(0LLLc)()()(0LLLc典型系统的期望对数幅频特性1
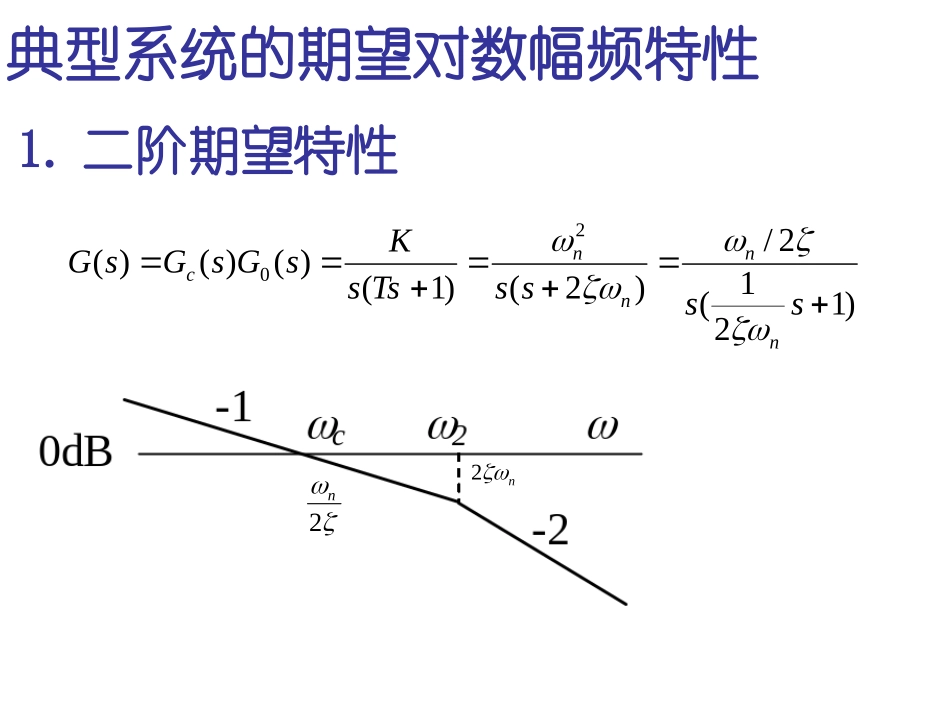
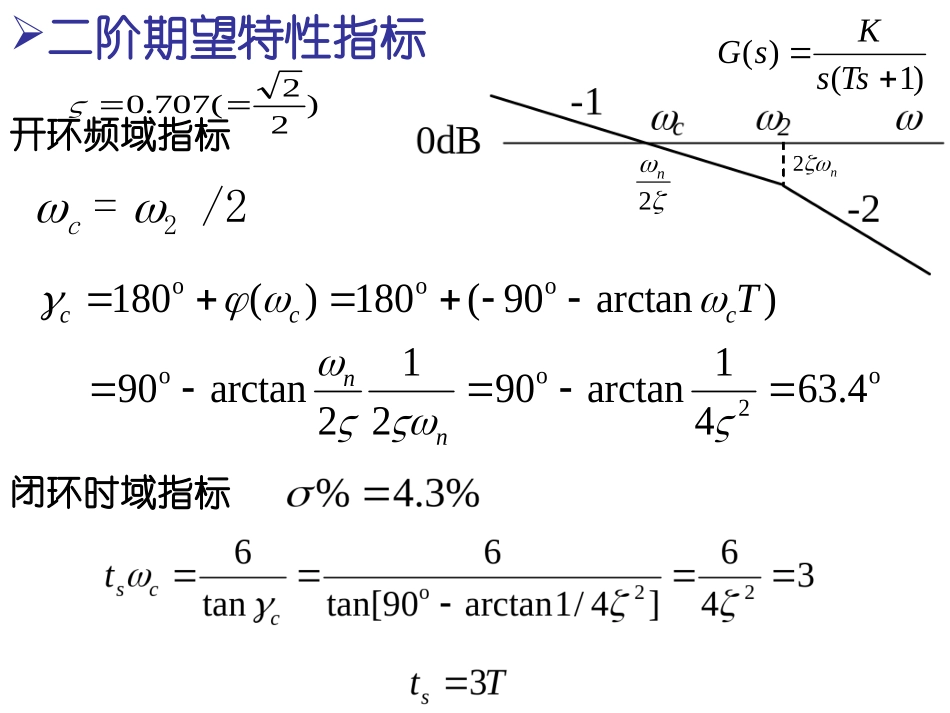
二阶期望特性2nn2)121(2/)2()1()()()(20ssssTssKsGsGsGnnnnc二阶期望特性指标开环频域指标c=2/2闭环时域指标)22(707
02nn2o2ooooo4
6341arctan90212arctan90)arctan90(180)(180nncccT)1()(TssKsG二阶期望特性法校正步骤•作原系统的伯德图L0(())•根据性能指标的要求作期望特性的L(())•两特性的伯德图相减,即得校正装置的伯德图Lc(())例:例:已知系统的开环传递函数已知系统的开环传递函数要求:要求:KvKv≥5≥5,,ttss200ss-1-1(2)(2),,ttss