机电一体化系统设计基础课程教学辅导第二章:机电一体化系统中常用执行机构一、教学建议通过文字教材了解机电一体化系统中常用的执行机构
流媒体课件讲解了机电一体化系统中常用执行机构的基本原理与选择方法在学习的过程中,如果有学习的心得和体会,请在课程论坛上和大家分享;如果有什么疑惑,也可以再课程论坛寻找帮助
学习完本知识点,可以结合本课程网上辅导栏目的形成性考核作业1检验对所学知识的掌握情况
二、教学要求:了解机电一体化系统中常用执行机构的基本原理与选择方法机械执行机构向执行末端件提供动力并带动它实现运动,即把传动机构传递过来的运动和动力进行必要的交换,以满足执行末端件的要求
执行机构的基本要求机电一体化产品的执行机构实现其主功能的重要环节,应能快速完成预期的动作,并具有响应速度快、动态性能好、动静态精度高和动作灵敏度高的特点,另外为便于计算机集中控制,还应满足惯量小、动力大、体积小、重量轻、便于维修和安装、易于计算机控制要求
微动执行机构微动执行机构是一种能在一定的范围内精确、微量地移动到给定的位置或实现特定的进给运动的机构
(1)热变形式热变形式执行机构属于微动机构,该类机构利用电热元件作为动力源,电热元件通电后产生的热变形实现微小位移
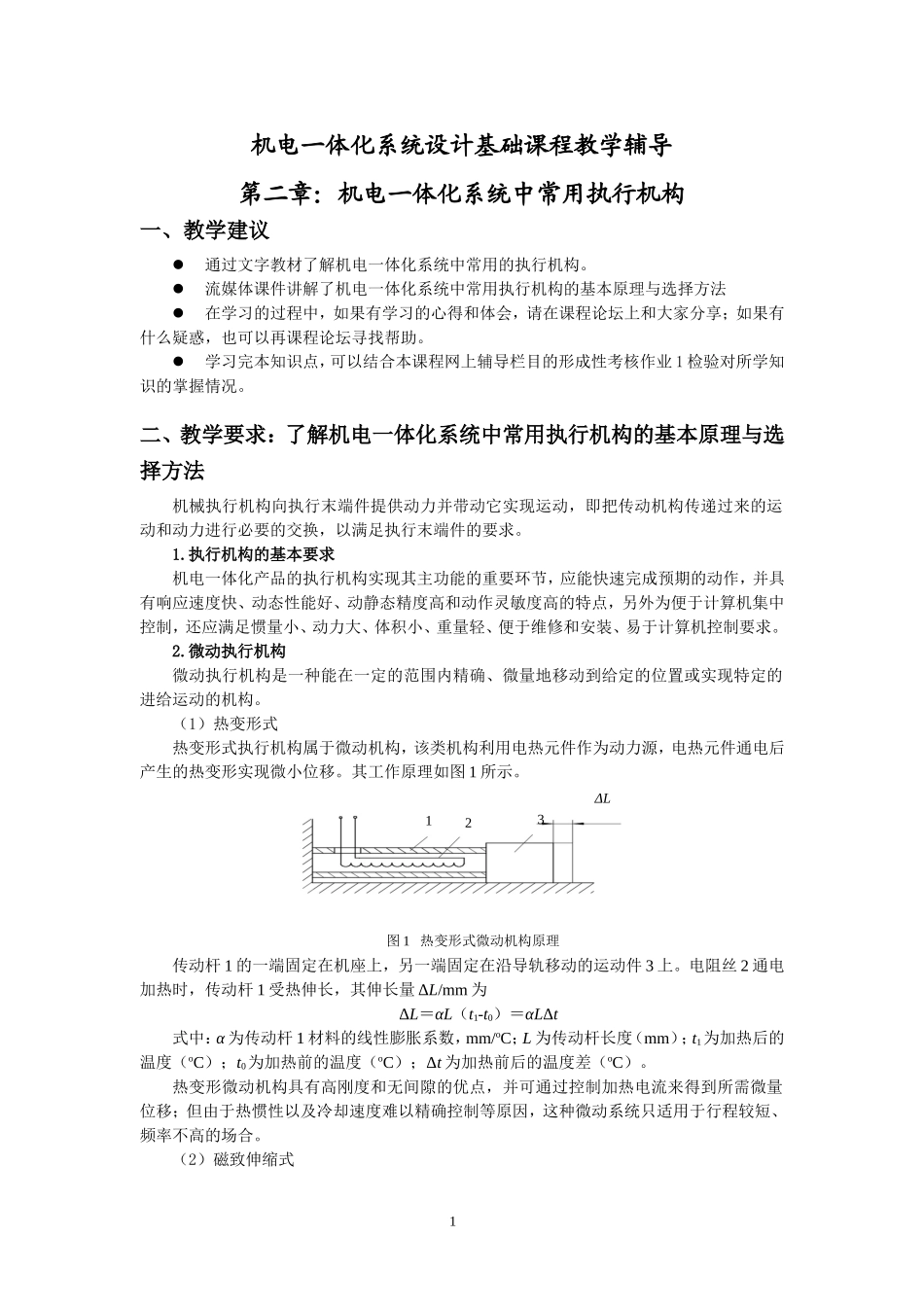
其工作原理如图1所示
传动杆1的一端固定在机座上,另一端固定在沿导轨移动的运动件3上
电阻丝2通电加热时,传动杆1受热伸长,其伸长量ΔL/mm为ΔL=αL(t1-t0)=αLΔt式中:α为传动杆1材料的线性膨胀系数,mm/oC;L为传动杆长度(mm);t1为加热后的温度(oC);t0为加热前的温度(oC);Δt为加热前后的温度差(oC)
热变形微动机构具有高刚度和无间隙的优点,并可通过控制加热电流来得到所需微量位移;但由于热惯性以及冷却速度难以精确控制等原因,这种微动系统只适用于行程较短、频率不高的场合
(2)磁致伸缩式1图1热