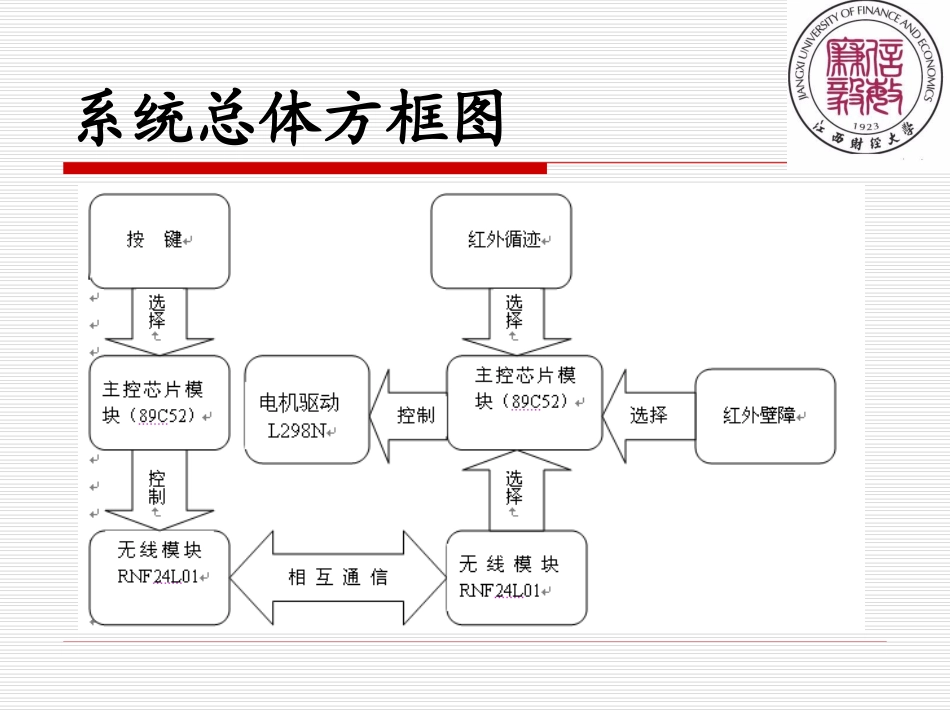
组长:组员:设计任务1、自制遥控器控制选择小车的运动方式2、遥控器可以方便灵活的控制小车的前进、转弯、加速等3、小车应具有自动寻迹功能4、壁障功能5、用LCD显示相关信息6、其他功能系统总体方框图功能模块主控制模块电机驱动模块循迹检测模块红外壁障模块无线控制模块电源模块LCD显示模块主控制模块用两片STC89C52单片机作为主控芯片,其中一片控制红外循迹,红外寻光,红外避障等模块检测,另一片用于无线遥控小车,根据按键向小车控制模块发送控制信号
能使两片单片机分别工作,避免了一片单片机工作程序太大而容量不足的缺点
主控制模块电机驱动模块采用专用芯片L298N作为电机驱动芯片电机驱动电路电机驱动模块P1
7小车状态0101前进1010后退0110左转1001右转循迹检测模块利用红外线发射管发射红外线,红外线二极管进行接收,再用运算放大器LM324对信号进行放大调整
其基本原理是:红外光线照射到路面并反射,由于黑线和白纸的反射系数不同,可根据接收到得反射光强转换为电信号,判断是否在循迹行驶
红外壁障模块采用光电式传感器E18-D80NK来实现小车壁障功能,前方无障碍输出高电平,有障碍输出口电平会从高电平变成低电平,将传感器发送的信号交单片机进行处理
根据单片机中设定的程序,对障碍物的情况进行判定,然后引导小车完成前进、左拐或者右拐的动作
无线控制模块Y开始初始化检测按键是否有低电平调用无线程序开始N无线控制模块电源模块可产生9V和5V电源,9V电源用于驱动电机,5V电源用于单片机和外围电路供电
1uFC5Cap0
1uFC6Cap0
1uFC7CapVCCINPUT1OUTPUT3GND2J37805112233J2KAIGUAN1KR1Res2DS1LED1GND2GND3IN1J1POWIN10uFC1CapPol10
1uFC3Ca