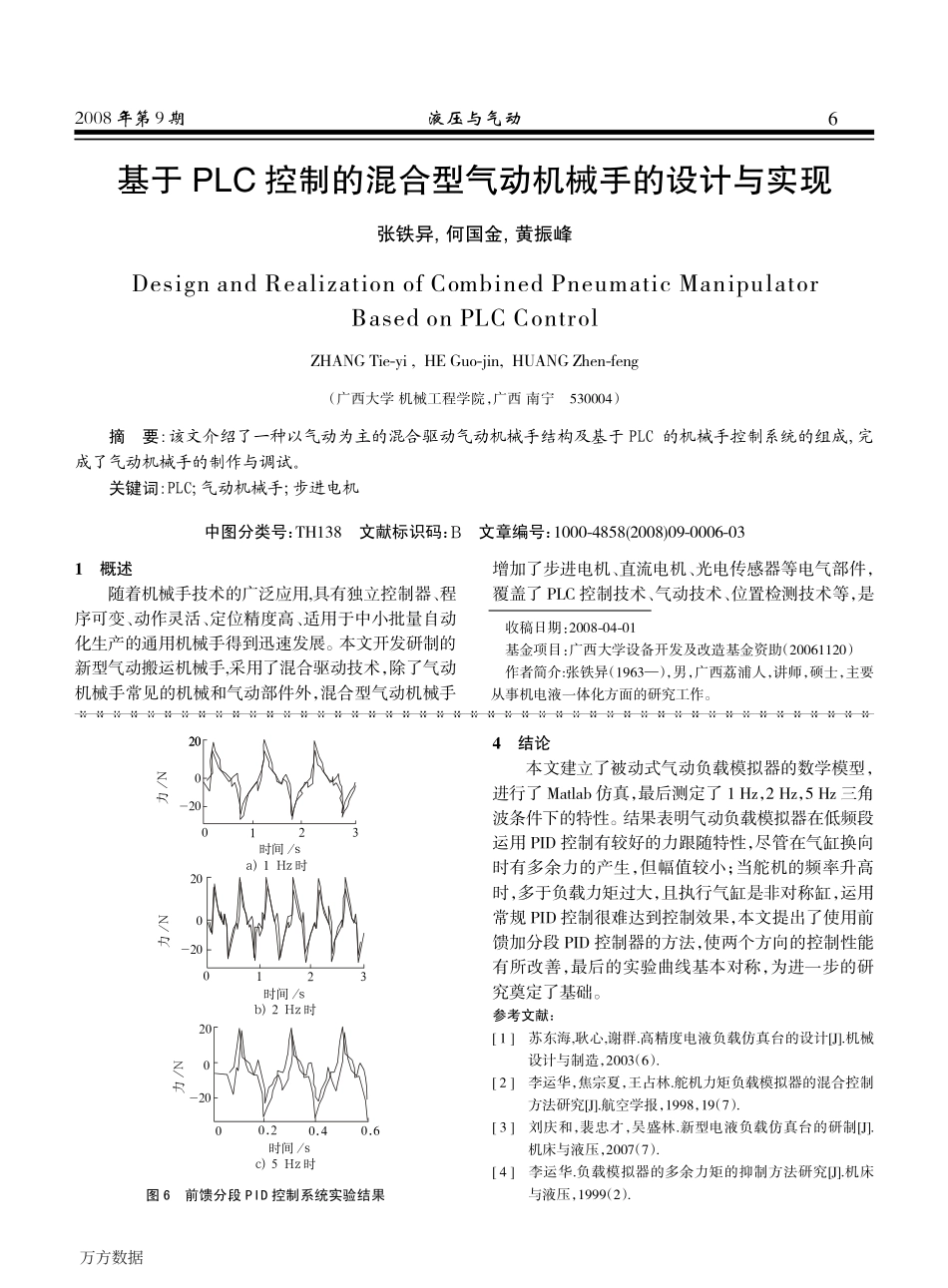
2008年第9期液压与气动图6前馈分段PID控制系统实验结果4结论本文建立了被动式气动负载模拟器的数学模型,进行了Matlab仿真,最后测定了1Hz,2Hz,5Hz三角波条件下的特性
结果表明气动负载模拟器在低频段运用PID控制有较好的力跟随特性,尽管在气缸换向时有多余力的产生,但幅值较小;当舵机的频率升高时,多于负载力矩过大,且执行气缸是非对称缸,运用常规PID控制很难达到控制效果,本文提出了使用前馈加分段PID控制器的方法,使两个方向的控制性能有所改善,最后的实验曲线基本对称,为进一步的研究奠定了基础
参考文献:[1]苏东海,耿心,谢群
高精度电液负载仿真台的设计[J]
机械设计与制造,2003(6)
[2]李运华,焦宗夏,王占林
舵机力矩负载模拟器的混合控制方法研究[J]
航空学报,1998,19(7)
[3]刘庆和,裴忠才,吴盛林
新型电液负载仿真台的研制[J]
机床与液压,2007(7)
[4]李运华
负载模拟器的多余力矩的抑制方法研究[J]
机床与液压,1999(2)
20200-200123时间/sa)1Hz时200-200123时间/sb)2Hz时200-2000
6时间/sc)5Hz时1概述随着机械手技术的广泛应用,具有独立控制器、程序可变、动作灵活、定位精度高、适用于中小批量自动化生产的通用机械手得到迅速发展
本文开发研制的新型气动搬运机械手,采用了混合驱动技术,除了气动机械手常见的机械和气动部件外,混合型气动机械手增加了步进电机、直流电机、光电传感器等电气部件,覆盖了PLC控制技术、气动技术、位置检测技术等,是基于PLC控制的混合型气动机械手的设计与实现张铁异,何国金,黄振峰DesignandRealizationofCombinedPneumaticManipulatorBasedonPLCControlZHANGTie-yi,HEGuo