PID控制-----闭环回路定值控制原理三菱PLC之PID应用讲解在工业控制中,PID控制(比例-积分-微分控制)得到了广泛的应用,这是因为PID控制具有以下优点:1)不需要知道被控对象的数学模型
实际上大多数工业对象准确的数学模型是无法获得的,对于这一类系统,使用PID控制可以得到比较满意的效果
据日本统计,目前PID及变型PID约占总控制回路数的90%左右
2)PID控制器具有典型的结构,程序设计简单,参数调整方便
3)有较强的灵活性和适应性,根据被控对象的具体情况,可以采用各种PID控制的变种和改进的控制方式,如PI、PD、带死区的PID、积分分离式PID、变速积分PID等
随着智能控制技术的发展,PID控制与模糊控制、神经网络控制等现代控制方法相结合,可以实现PID控制器的参数自整定,使PID控制器具有经久不衰的生命力
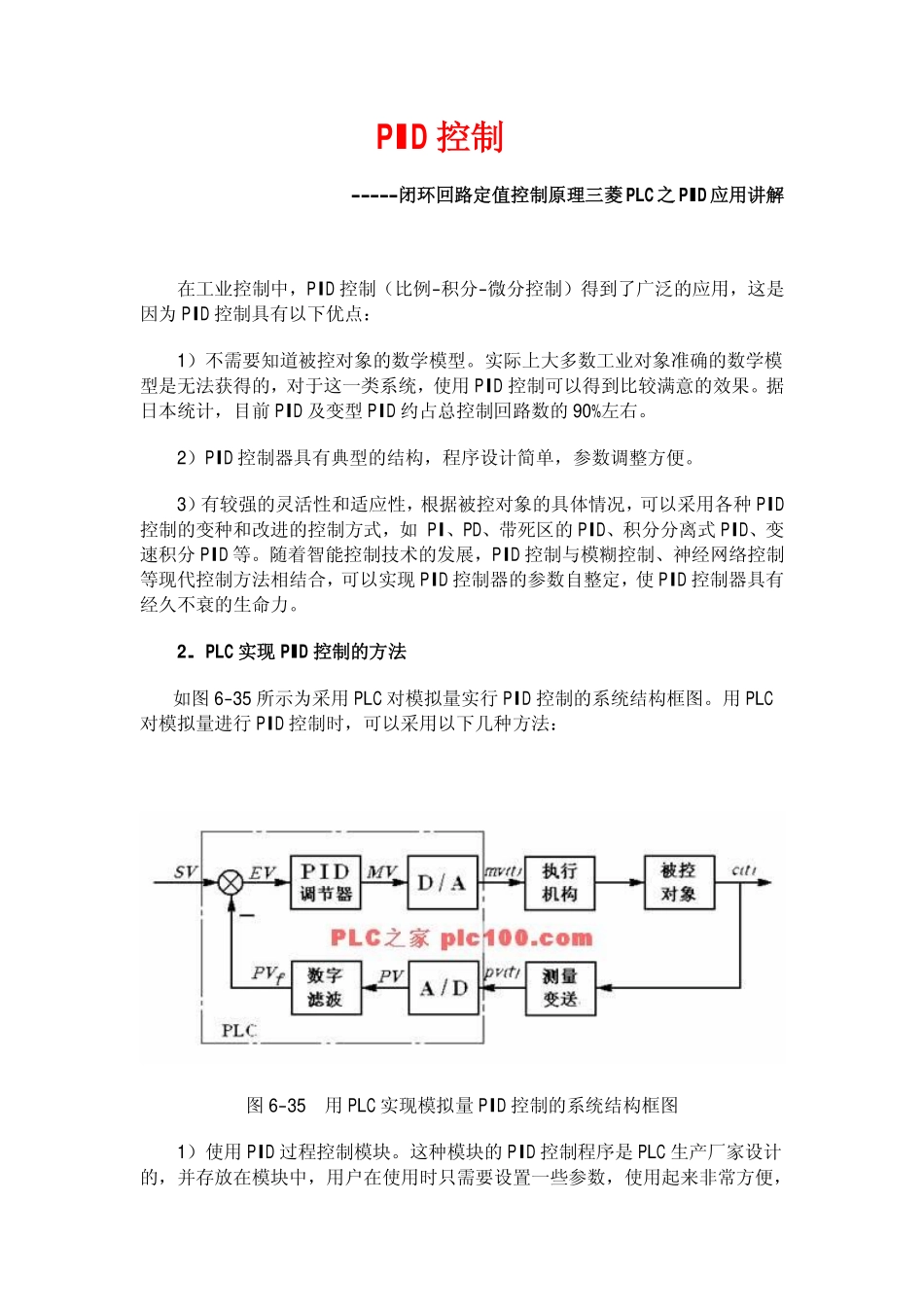
PLC实现PID控制的方法如图6-35所示为采用PLC对模拟量实行PID控制的系统结构框图
用PLC对模拟量进行PID控制时,可以采用以下几种方法:图6-35用PLC实现模拟量PID控制的系统结构框图1)使用PID过程控制模块
这种模块的PID控制程序是PLC生产厂家设计的,并存放在模块中,用户在使用时只需要设置一些参数,使用起来非常方便,一块模块可以控制几路甚至几十路闭环回路
但是这种模块的价格昂贵,一般在大型控制系统中使用
如三菱的A系列、Q系列PLC的PID控制模块
2)使用PID功能指令
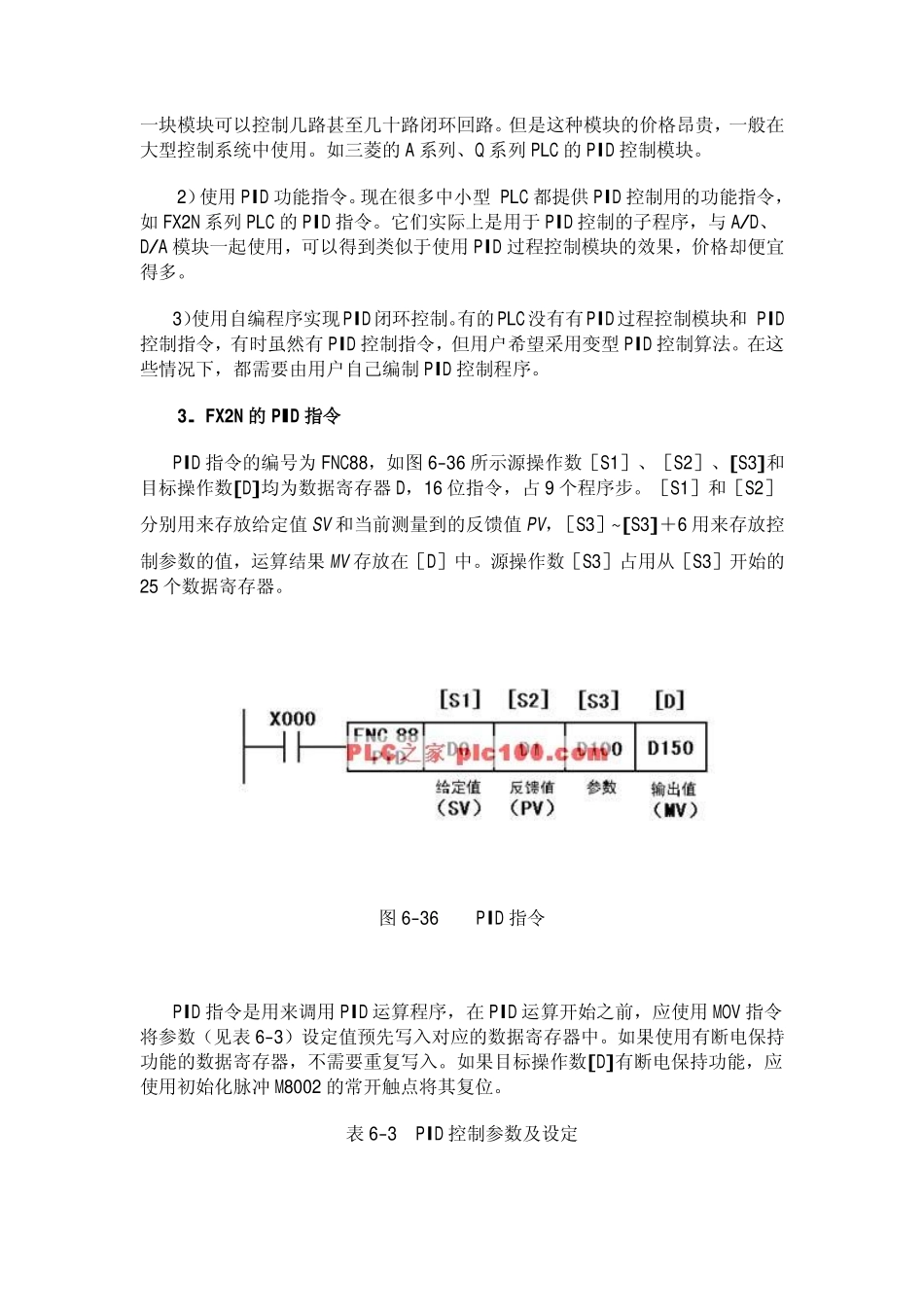
现在很多中小型PLC都提供PID控制用的功能指令,如FX2N系列PLC的PID指令
它们实际上是用于PID控制的子程序,与A/D、D/A模块一起使用,可以得到类似于使用PID过程控制模块的效果,价格却便宜得多
3)使用自编程序实现PID闭环控制
有的PLC没有有PID过程控制模块和PID控制指令,有时虽然有PID控制指令,但用户希望采用变型PID控制算法