研究生自动控制专业实验地点:A区主楼518房间平面二级倒立摆系统实验报告主编:钱玉恒,杨亚非哈工大航天学院控制科学实验室平面二级倒立摆控制系统实验报告一、实验内容1、熟悉平面二级倒立摆控制系统的结构和原理;2、了解平面二级倒立摆物理模型建模与控制器设计;3、掌握LQR控制器仿真与实验;二、实验设备1、平面二级倒立摆控制系统一套平面二级倒立摆控制系统包括平面二级倒立摆控制器、平面二级倒立摆本体实验装置等组成
在平面二级倒立摆本体上有起动/停止电源开关,螺旋浆起动/停止开关
2、平面二级倒立摆控制系统计算机部分平面二级倒立摆控制系统计算机部分主要有计算机、SV-400控制卡等;三、实验步骤1、系统实验的线路连接平面二级倒立摆本体与计算机全部采用标准线连接,电源部分有标准电源线,在试验前,实验装置的线路已经连接完毕
2、启动实验装置通电之前,请详细检察电源等连线是否正确,确认无误后,可接平面二级倒立摆本体电源,随后起动计算机和控制器
3、系统实验的参数调试根据仿真的数据及控制规则进行参数调试,直到获得较理想参数为止
四、实验要求1、学生上机前要求学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试
12、学生上机要求上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定
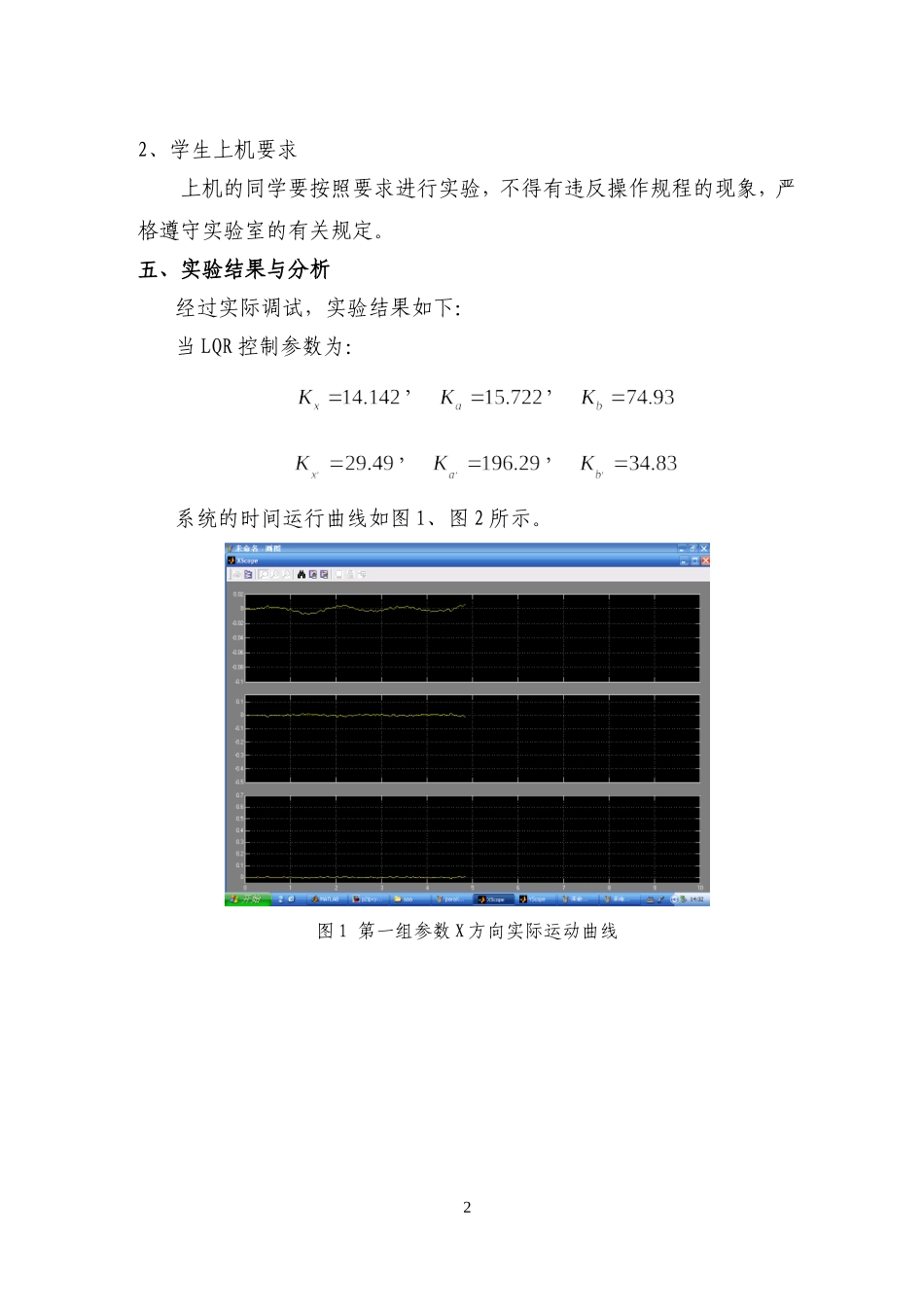
五、实验结果与分析经过实际调试,实验结果如下:当LQR控制参数为:,,,,系统的时间运行曲线如图1、图2所示
图1第一组参数X方向实际运动曲线2图2第二组参数Y方向实际运动曲线从图1、图2中可以看出,X方向控制较好,但Y方向控制的波动幅度比较大,为此,需要进一步调整LQR控制参数
经过多次试验,得到如下一组比较好的控制参数:,,,,该组参数下,系统的实际运行曲线如下图3、图4所示
从图3、图4可以看出,在该组参数的作用下,系统的控制