一体焊专用焊接机器人系统设计1焊接机器人性能指标衡量机器人性能的技术指标主要有:重复定位精度、最大负荷、工作范围、运动速度、柔性能力、动态响应性、控制稳定性及稳态精度等
这些指标关联了机器人的系统功能及智能化程度,决定了机器人系统的整体结构和控制方式
2系统总体功能分析2
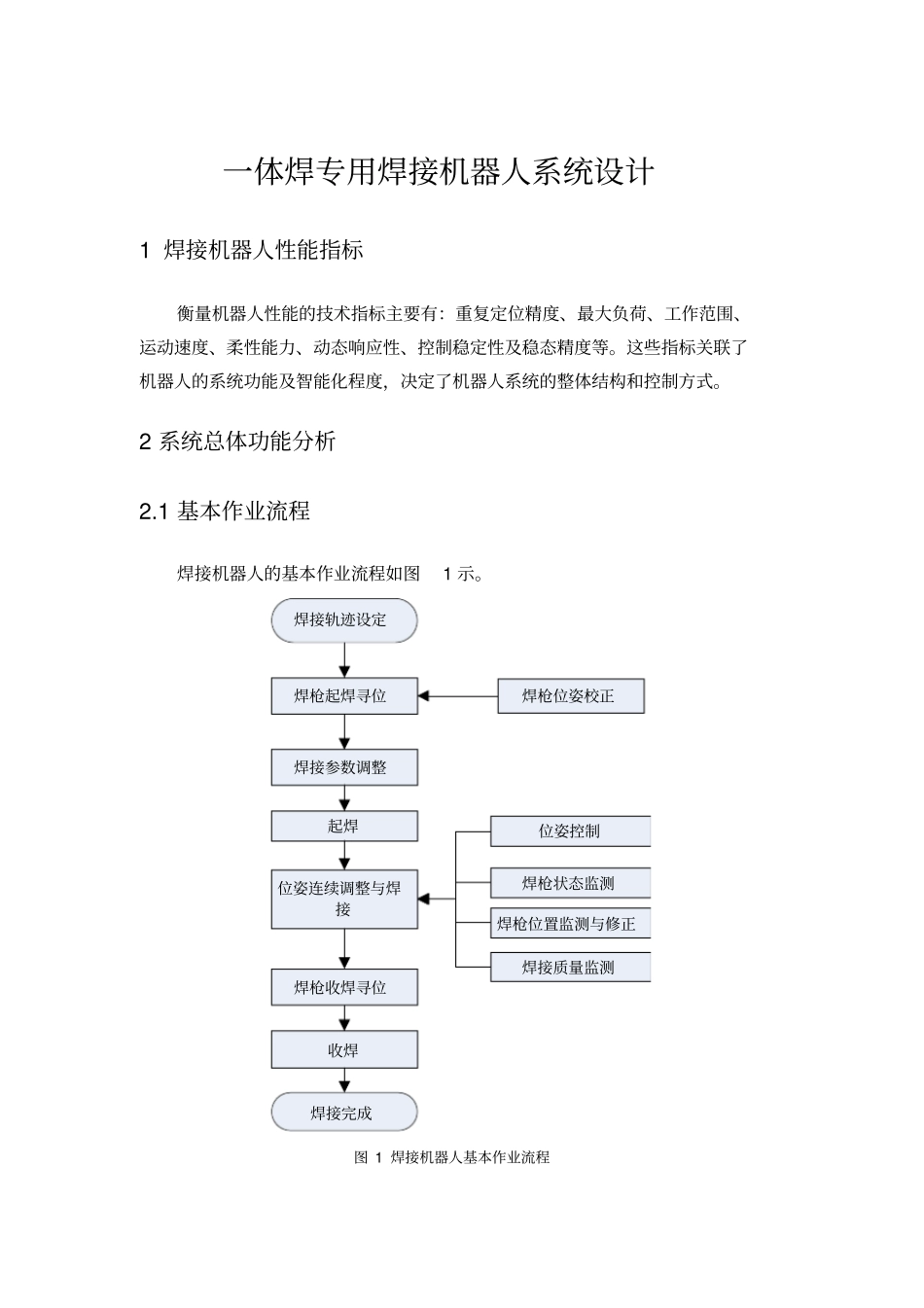
1基本作业流程焊接机器人的基本作业流程如图1示
焊接轨迹设定焊接参数调整起焊位姿连续调整与焊接焊枪收焊寻位收焊焊接完成焊枪位姿校正位姿控制焊枪状态监测焊枪位置监测与修正焊接质量监测焊枪起焊寻位图1焊接机器人基本作业流程2
2系统功能分析基于焊接机器人的基本作业流程,其系统功能应包括以下几个方面:1
人机交互方式(控制模式选择、用户界面、焊接轨迹显示、实时编程等)2
柔性能力(编程模式如示教模式、离线编程模式或机器人语言编程模式)3
系统控制与反馈(1)焊接质量监测:焊接电流、电压、压力、时间等;(2)焊枪状态监测:位姿、速度、加速度、负载扰动等;(3)焊枪寻位能力控制功能(起焊点与收焊点);(4)焊枪与焊点相对位置的偏差检测与修正
焊接功能分析(1)焊枪位移;(2)焊枪姿态调整
3机械结构方案分析在一体焊专用机器人的所有系统功能中,与机械结构紧密相关的主要是焊接功能,为确定机器人系统的机械结构方案,特对其焊接功能进行分析
1焊枪位移1
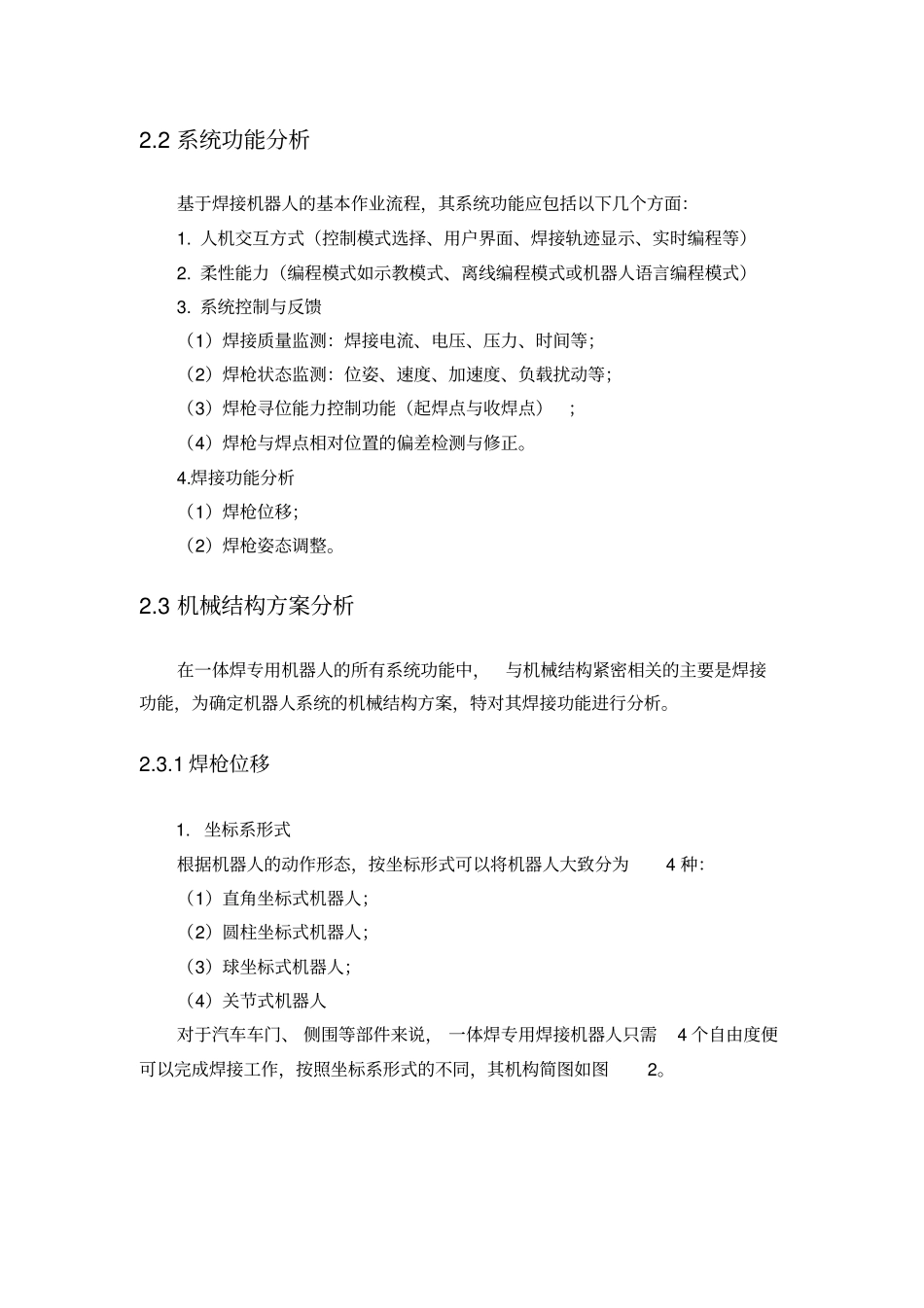
坐标系形式根据机器人的动作形态,按坐标形式可以将机器人大致分为4种:(1)直角坐标式机器人;(2)圆柱坐标式机器人;(3)球坐标式机器人;(4)关节式机器人对于汽车车门、侧围等部件来说,一体焊专用焊接机器人只需4个自由度便可以完成焊接工作,按照坐标系形式的不同,其机构简图如图2
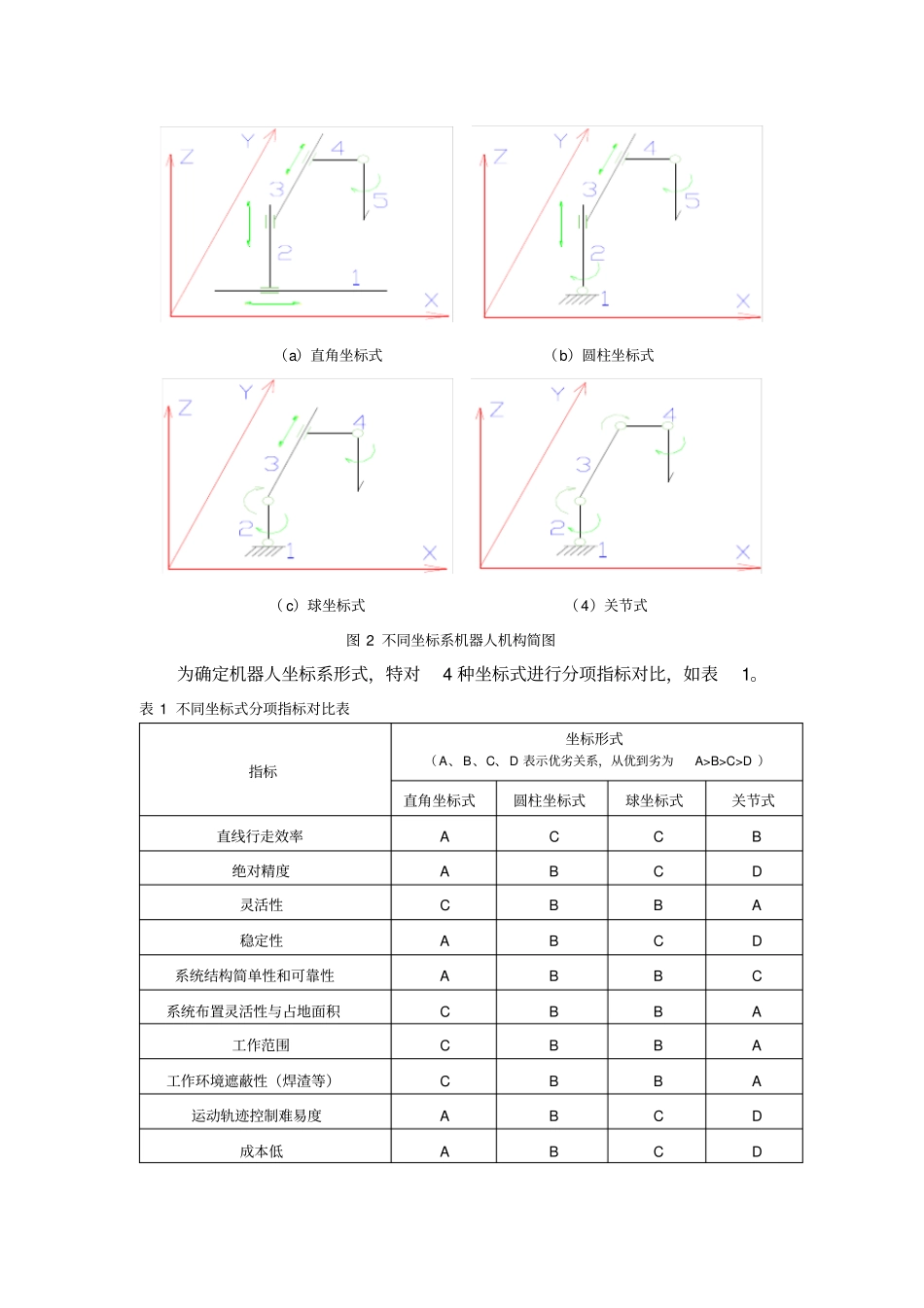
(a)直角坐标式(b)圆柱坐标式(c)球坐标式(4)关节式图2不同坐标系机器人机构简图为确定机器人坐标系形式,特对4种坐标式进行分项指标对比,如表1
表1不同坐标式分项指标对比表指标