U-PACKEngineering(Shanghai)Co
上海昱庄机械有限公司纸箱机器人码垛工作站方案说明一、项目内容:1
1项目名称:纸箱机器人码垛工作站1
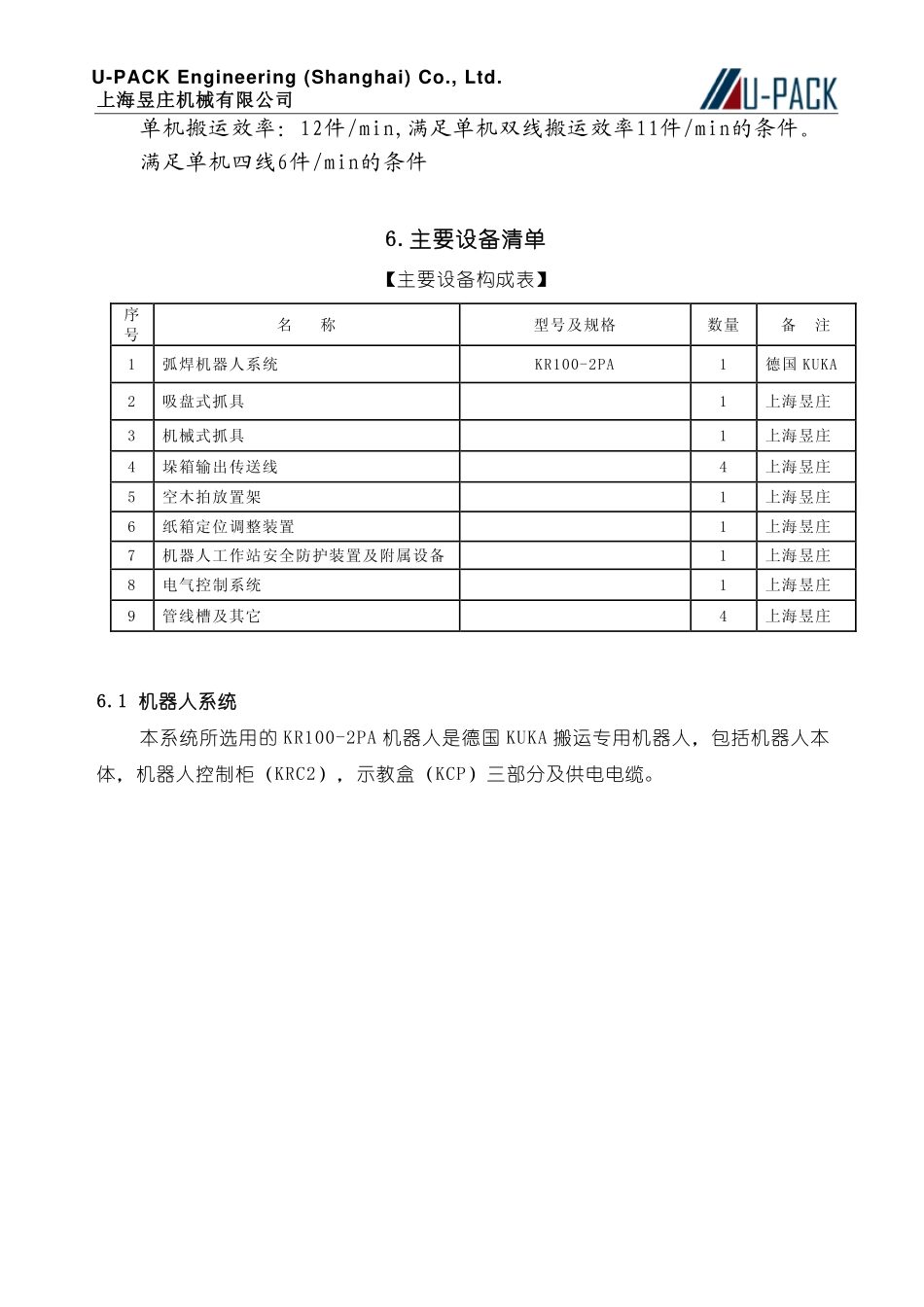
2设备数量:该工作站主要包括一台KR100-2PA搬运机器人,1套吸盘式抓具、1套机械式抓具、四套垛箱输出传送线,一套空木拍放置架,一套纸箱定位调整装置,一套安全栏和一套控制系统
3设备用途该工作站用于纸箱的下线码垛
1用户提出的“技术参数及技术要求”
2用户提供的工件尺寸及生产线的速度
3KR100-2PA机器人的特性参数
系统特点:该系统具备以下特点:(1)机器人根据程序的设定,以及接受到的不同生产线工件到位信号,自动切换不同生产线抓取程序
(2)整个系统单元由系统控制柜(PLC)统一集中控制,包括机器人的信号交换,防撞信号、安全门锁、纸箱到位信号、木拍位置信号等逻辑关系
(3)由于在系统设计上及设备配置上充分考虑到安全性,故工作站具有较高的安全性
(4)操作、编程、示教在手持控制器KCP2上完成,控制电缆长10米
完全根据工效学设计的示教器,配上六维滑鼠,使用方便、舒服、快速
大大提高编程和操作的效率
(5)生产线的自动化设计,大大减轻劳动者的劳动强度
系统方案介绍U-PACKEngineering(Shanghai)Co
上海昱庄机械有限公司该工作站主要包括一台KR100-2PA搬运机器人,一套吸盘式抓具,1套机械式抓具、四套垛箱输出传送线,一套空木拍放置架,一套纸箱定位调整装置,一套安全栏和一套控制系统
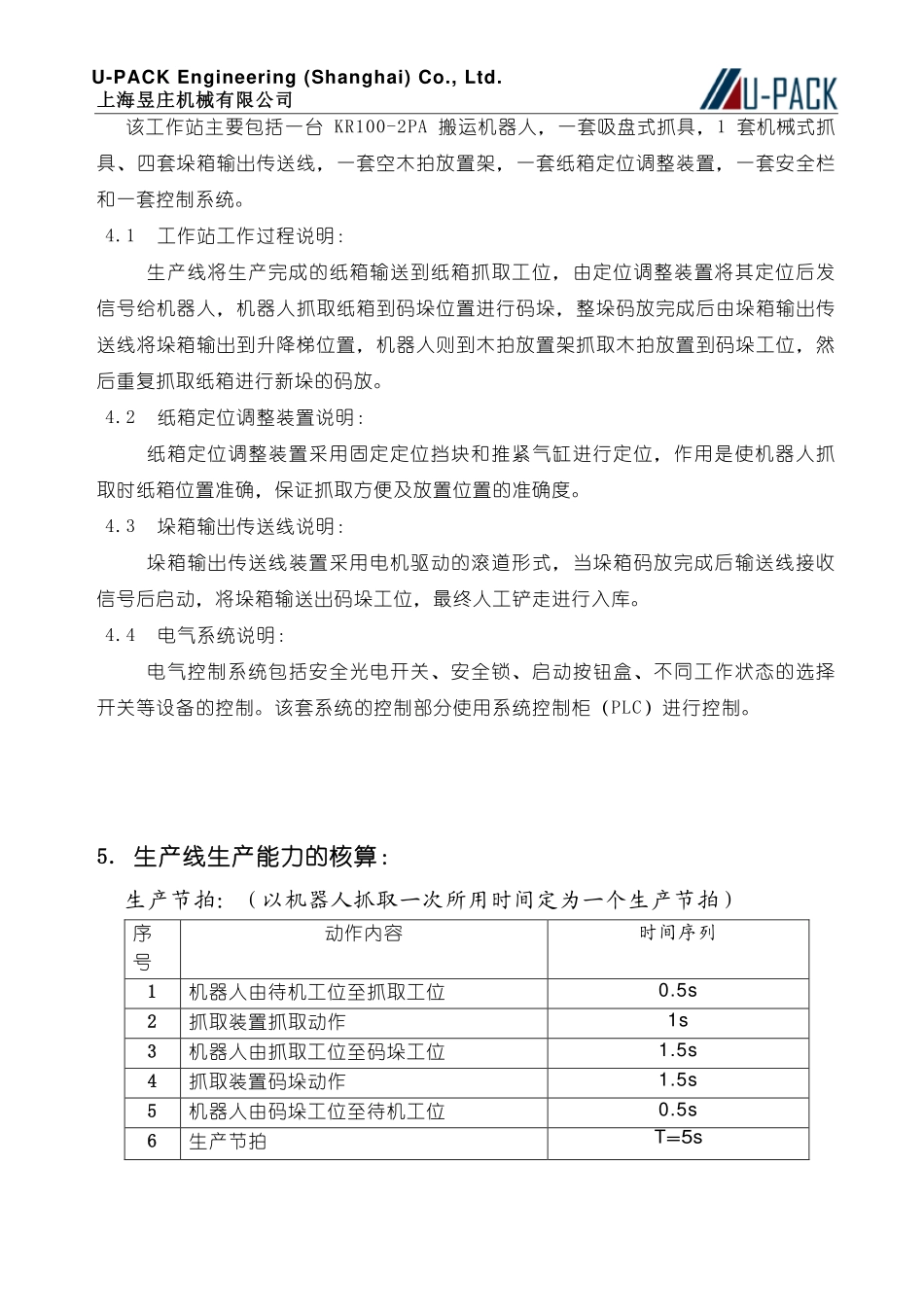
1工作站工作过程说明:生产线将生产完成的纸箱输送到纸箱抓取工位,由定位调整装置将其定位后发信号给机器人,机器人抓取纸箱到码垛位置进行码垛,整垛码放完成后由垛箱输出传送线将垛箱输出到升降梯位置,机器人则到木拍放置架抓取木拍放置到码垛工位