目录一、前言--------------------------------------------------------------(2)二、夹持器设计的基本要求--------------------------------------(2)三、夹持器方案选择--------------------------------(3)四、夹持器装置设计--------------------------------(7)五、小结------------------------------------------(12)六、夹持器三维造型截图----------------------------(13)七、参考文献--------------------------------------(14)机械手夹持器设计摘要:机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置
本文着重描述了夹持型机械手的设计,包括总体要求的分析、结构的设计、驱动方式的选择,通过三种设计方案的比对,最终确定一种符合要求的方案,写出详细的设计、计算过程
关键词:机械手抓持结构设计驱动方式夹持器一、前言随着社会的进步与发展,工业机器人正逐步在人类社会中大显身手
它主要由类似人的手和臂组成以代替人的繁重劳动,从而实现生产的机械化和自动化
而机械手手部是用来抓持工件(或工具)的部件,有多种结构形式,比如如夹持型、托持型和吸附型等
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等
本人经历了第八届机械设计大赛,其中运用到机械手夹持,因此此次创新设计就是针对物块夹持器进行研究设计
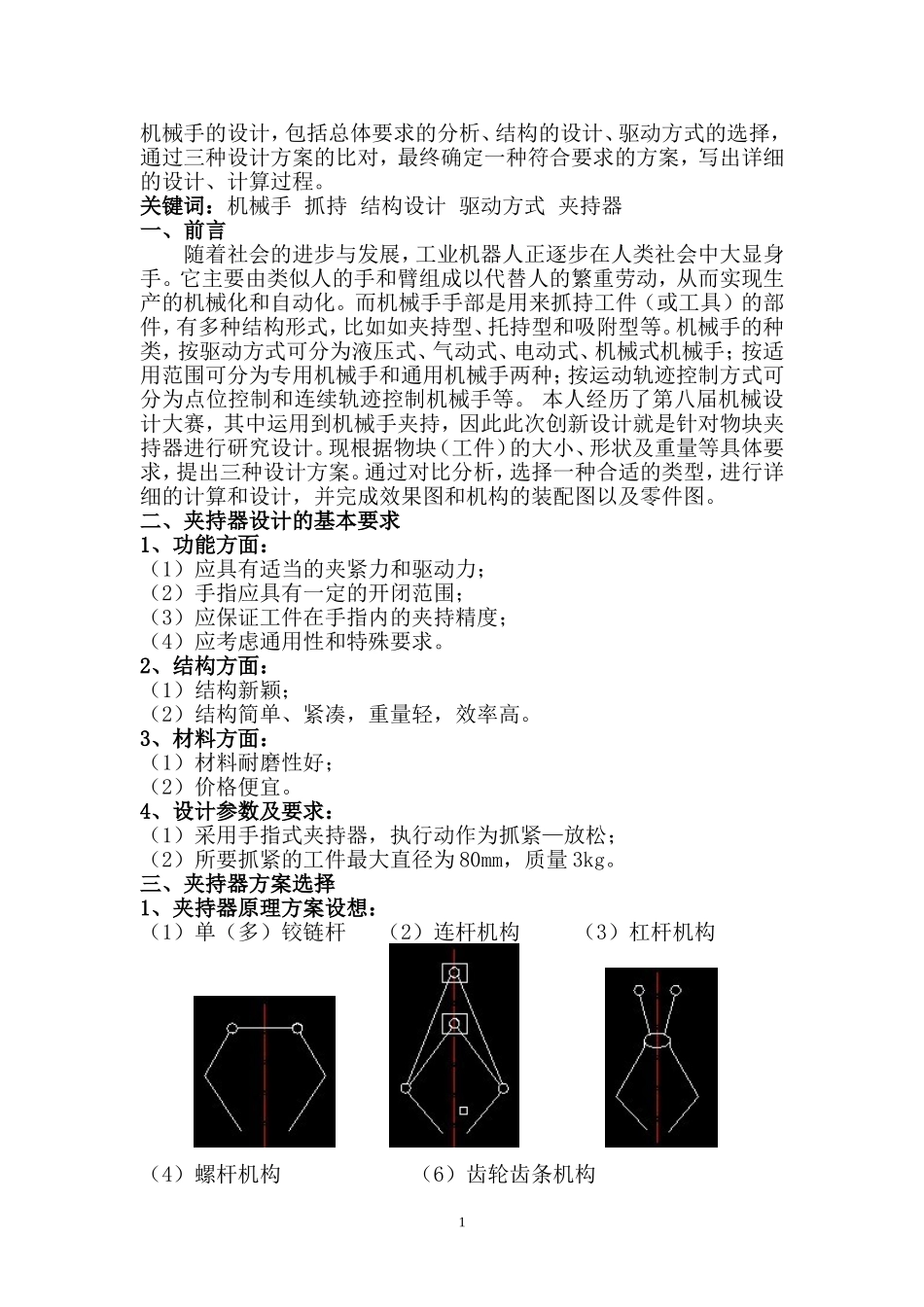
现根据物块(工件)的大小、形状及重量等具体要求,提出三种设计方案