多维无约束优化算法多维无约束优化问题的一般数学表达式为:求n维设计变量12[]Tnxxxx使目标函数()minfx多维无约束优化算法就是求解这类问题的方法,它是优化技术中最重要最基础的内容之一
因为它不仅可以直接用来求解无约束优化问题,而且实际工程设计问题中的大量约束优化问题,有时也是通过对约束条件的适当处理,转化为无约束优化问题来求解的
所以,无约束优化方法在工程优化设计中有着十分重要的作用
目前已研究出很多种无约束优化方法,它们的主要不同点在于构造搜索方向上的差别
(1)间接法——要使用导数,如梯度法、(阻尼)牛顿法、变尺度法、共轭梯度法等
(2)直接法——不使用导数信息,如坐标轮换法、鲍威尔法单纯形法等
用直接法寻找极小点时,不必求函数的导数,只要计算目标函数值
这类方法较适用于解决变量个数较少的(n≤20)问题,一般情况下比间接法效率低
间接法除要计算目标函数值外,还要计算目标函数的梯度,有的还要计算其海赛矩阵
各种优化方法之间的主要差异是在于构造的搜索方向,因此,搜索方向的构成问题乃是无约束优化方法的关键
下面介绍几种经典的无约束优化方法
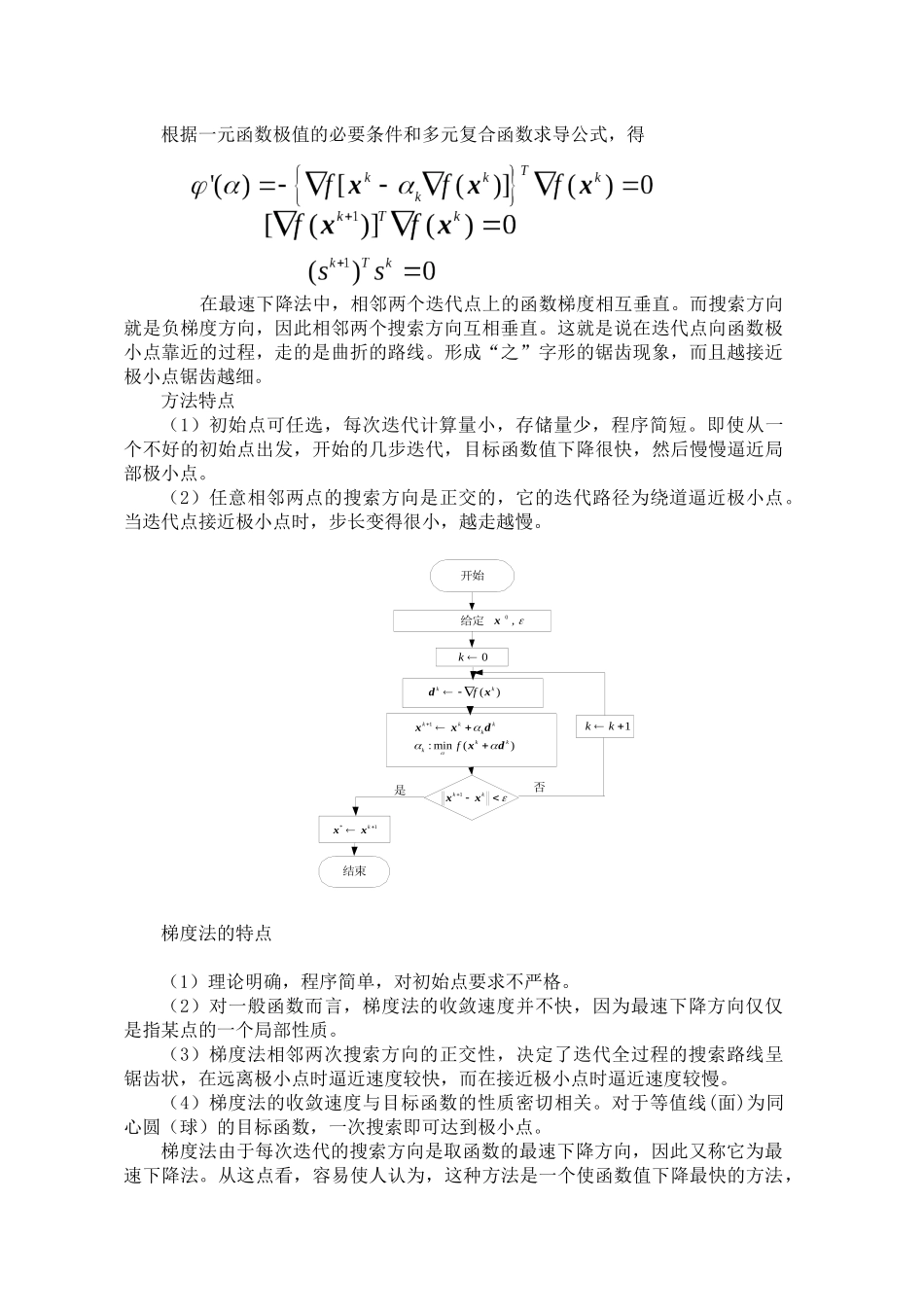
1、梯度法基本思想:函数的负梯度方向是函数值在该点下降最快的方向
将n维问题转化为一系列沿负梯度方向用一维搜索方法寻优的问题,利用负梯度作为搜索方向,故称最速下降法或梯度法
搜索方向s取该点的负梯度方向(最速下降方向),使函数值在该点附近的范围内下降最快
为了使目标函数值沿搜索方向()kfx能够获得最大的下降值,其步长因子k应取一维搜索的最佳步长
即有根据一元函数极值的必要条件和多元复合函数求导公式,得在最速下降法中,相邻两个迭代点上的函数梯度相互垂直
而搜索方向就是负梯度方向,因此相邻两个搜索方向互相垂直
这就是说在迭代点向函数极小点靠近的过程,走的是曲折的路线
形成“之”字形的锯齿现象,而且越接近极小点锯齿越细