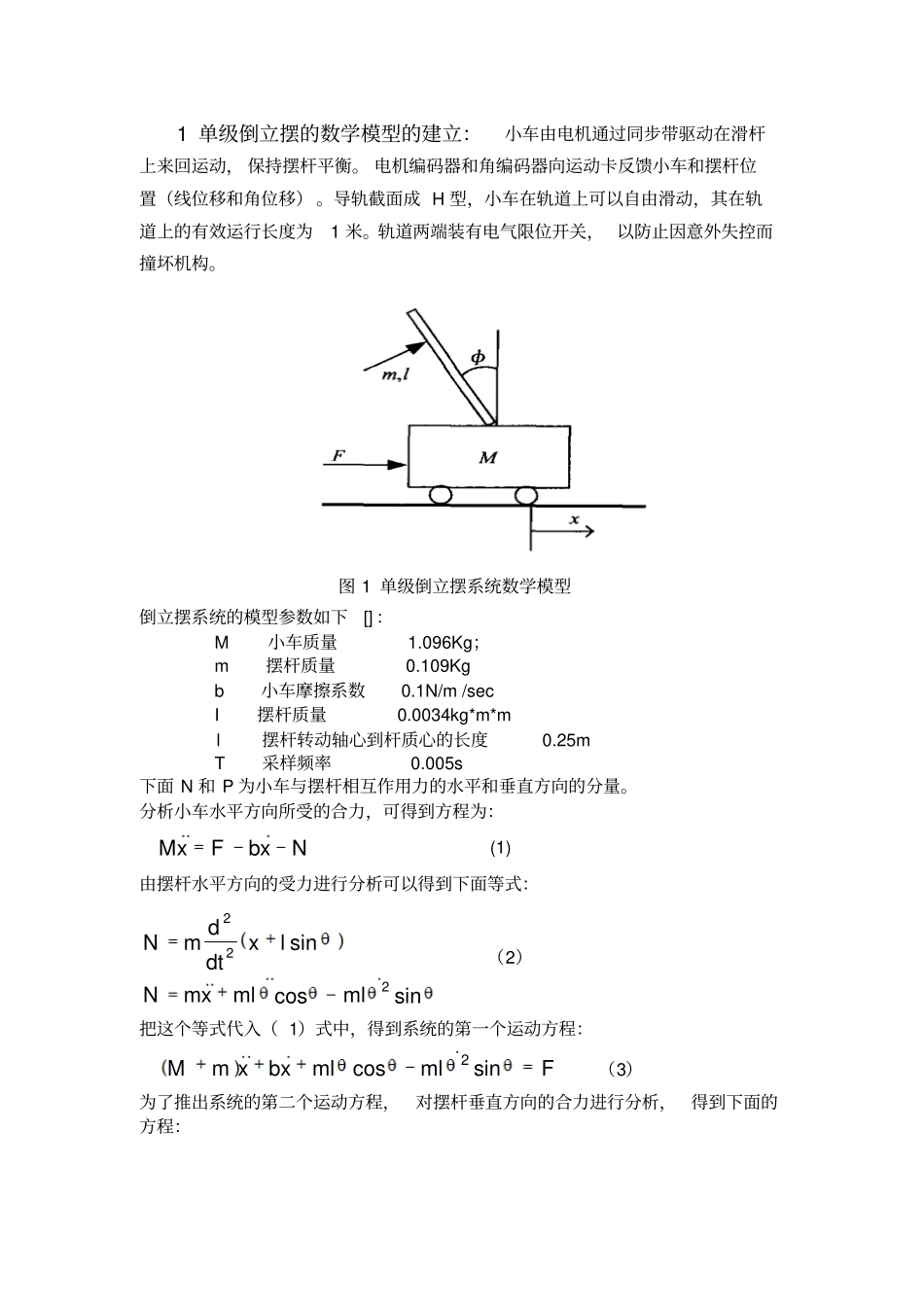
1单级倒立摆的数学模型的建立:小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡
电机编码器和角编码器向运动卡反馈小车和摆杆位置(线位移和角位移)
导轨截面成H型,小车在轨道上可以自由滑动,其在轨道上的有效运行长度为1米
轨道两端装有电气限位开关,以防止因意外失控而撞坏机构
图1单级倒立摆系统数学模型倒立摆系统的模型参数如下[]:M小车质量1
096Kg;m摆杆质量0
109Kgb小车摩擦系数0
1N/m/secI摆杆质量0
0034kg*m*ml摆杆转动轴心到杆质心的长度0
25mT采样频率0
005s下面N和P为小车与摆杆相互作用力的水平和垂直方向的分量
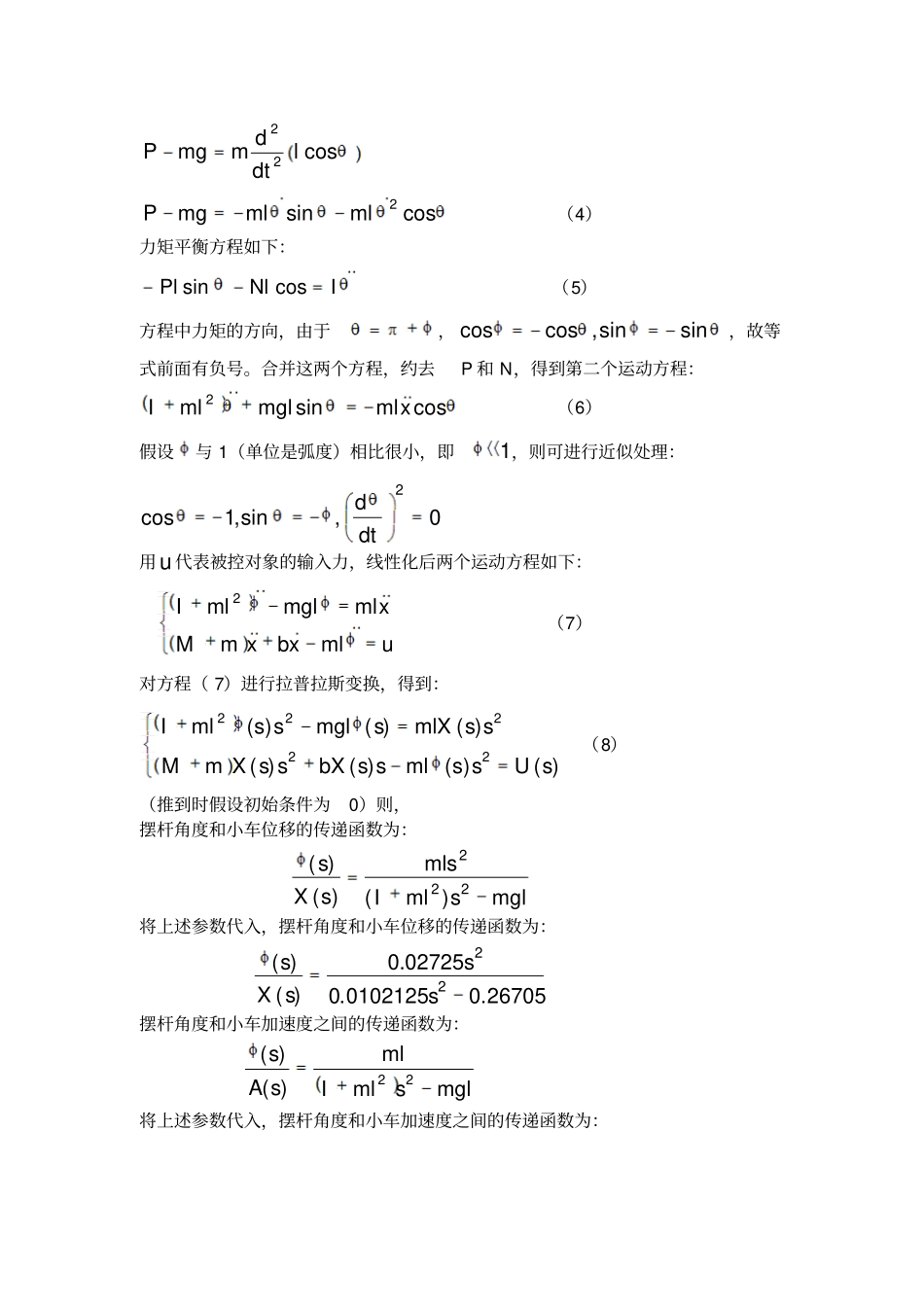
分析小车水平方向所受的合力,可得到方程为:NxbFxM(1)由摆杆水平方向的受力进行分析可以得到下面等式:sincossin222mlmlxmNlxdtdmN(2)把这个等式代入(1)式中,得到系统的第一个运动方程:FmlmlxbxmMsincos2(3)为了推出系统的第二个运动方程,对摆杆垂直方向的合力进行分析,得到下面的方程:cos22ldtdmmgPcossin2mlmlmgP(4)力矩平衡方程如下:INlPlcossin(5)方程中力矩的方向,由于,sinsin,coscos,故等式前面有负号
合并这两个方程,约去P和N,得到第二个运动方程:cossin2xmlmglmlI(6)假设与1(单位是弧度)相比很小,即1,则可进行近似处理:0,sin,1cos2dtd用u代表被控对象的输入力,线性化后两个运动方程如下:umlxbxmMxmlmglmlI2(7)对方程(7)进行拉普拉斯变换,得到:)()()()()()()(22222sUssmlssbXssXmMssmlXsmglssmlI(8)(推到时假设初始条件为0)则,摆杆角度和小车位移的传递函数为:mglsmlImlssXs222)()()(将上述参数代入