比赛技术报告光电组王奉献该智能循迹小车以单片机最小系统为核心,辅以电源模块、图像采集模块、电机驱动模块和运行调试模块
小车通过龙邱线性采集赛道信息,经过不断改进机械结构并优化算法,小车可以完美地识别各种赛道信息
经过图像处理后,通过转向控制策略与算法驱动电机速度,实现路径的检测与识别
这份技术报告中,我将通过对整体方案、软件算法、机械结构、调试参数等方面进行介绍
一机械结构根据比赛规则,此次比赛选用型车模,对车模本身进行改造
①首先去除原有车模的减震模块
(根据以往经验用处不大;且影响车模重心;占电池摆放位置)②为防止摩擦对车模前轴槽进行磨除
③改变原有的连接方法改用硬连接
④前轴加入垫片;增大轴距
(不影响正常转动)⑤后轴同样处理
(解决电机声音大的问题,齿轮咬合不好)⑥使用打印制作的连接座作为碳杆连接
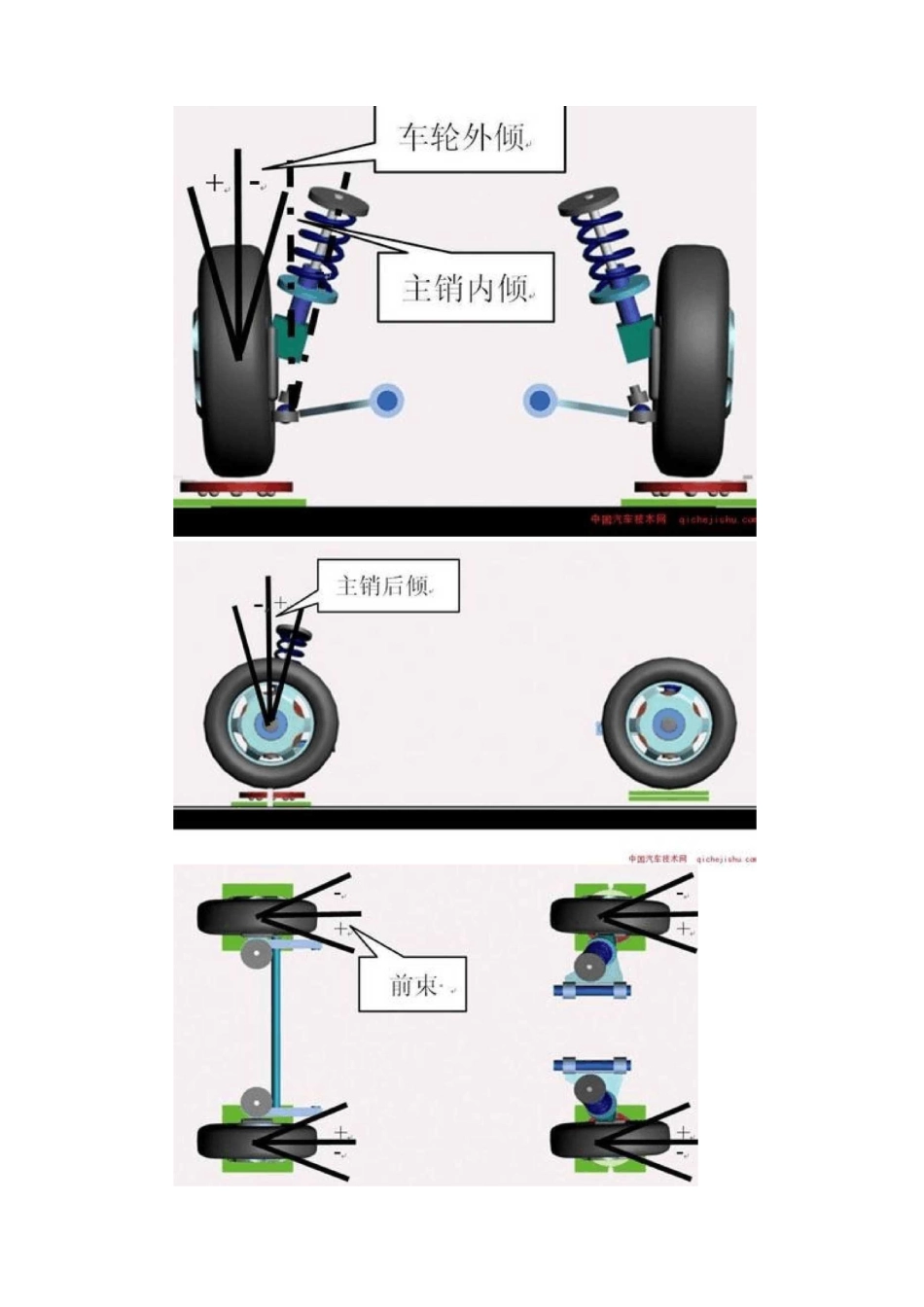
(注意放置在车模正中间)⑦改变主销后倾,主销内倾和前束,其具体作用见下:主销后倾和主销内倾都有使转向轮自动回正的作用
但主销后倾的回正作用与车速有关,而主销内倾的回正作用与车速无关
因此,高速时主要靠主销后倾的作用,而低速时主要靠主销内倾的作用
前束的作用主要是为了使车辆具有自动回正的功能
前束一般为正
前束过小,方向不能自动回正(前轮前束过小);过大会导致轮胎外侧过度偏磨或者轮胎“起级”
同时,方向盘转向较沉(前轮前束过大)
主销内倾角的作用:在车载重时,能平衡掉悬挂系统因负重时产生的位移
使车轮在车辆负重时,能垂直于地面,减小轮胎的磨损
从车头望向车轮车轮与铅垂线的夹角称为外倾角,若轮胎上端向外倾斜即左右轮呈形称为正外倾角向内倾斜为负外倾角
基本上,正外顷角的设定有较佳的灵活度,而负外顷角具较稳定的直进性
⑧在某些位置添加垫片降低车模整体高度,提升稳定性
(如前后轮的垫片;电机座的垫片)二软件算法介绍:电荷耦合元件
可以称为图像传感器也叫图像控制器
是一种半导体器件,