动态相对定位原理如前所述,动态相对定位是将一台接收机安置在一个固定的观测站(或称基准站)上,而另一台接收机安置在运动的载体上,并保持在运动中与基准站的接收机进行同步观测相同卫星,以确定运动载体相对基准站的瞬时位置
按照所采取的观测量性质的不同,动态相对定位可分为测码伪距动态相对定位和测相伪距动态相对定位
目前测码伪距动态相对定位的实时定位精度可达米级
测相伪距动态相对定位是以预先初始化或动态解算载波相位整周未知数为基础的一种高精度动态相对定位法,目前在较小范围内(如〈20km〉的定位精度可达1~2cm
按照数据处理的方式不同,动态相对定位通常又可分为实时处理和测后处理
实时处理就是在观测过程中实时地获得定位结果,无需存储观测数据
但是流动站和基准站之间必须实时的传输观测数据
这种处理方式主要用于需要实时获取定位数据的导航、监测等工作
测后处理则是在观测工作结束后,通过数据处理而获得定位的结果
这种处理方法可对观测数据进行详细的分析,易于发现粗差,也不需要实时的传输数据
但需要存储观测数据
这种处理方式主要用于基线较长,不需实时获得定位结果的测量工作
下面分别对测码伪距动态相对定位和测相伪距动态相对定位作简单介绍
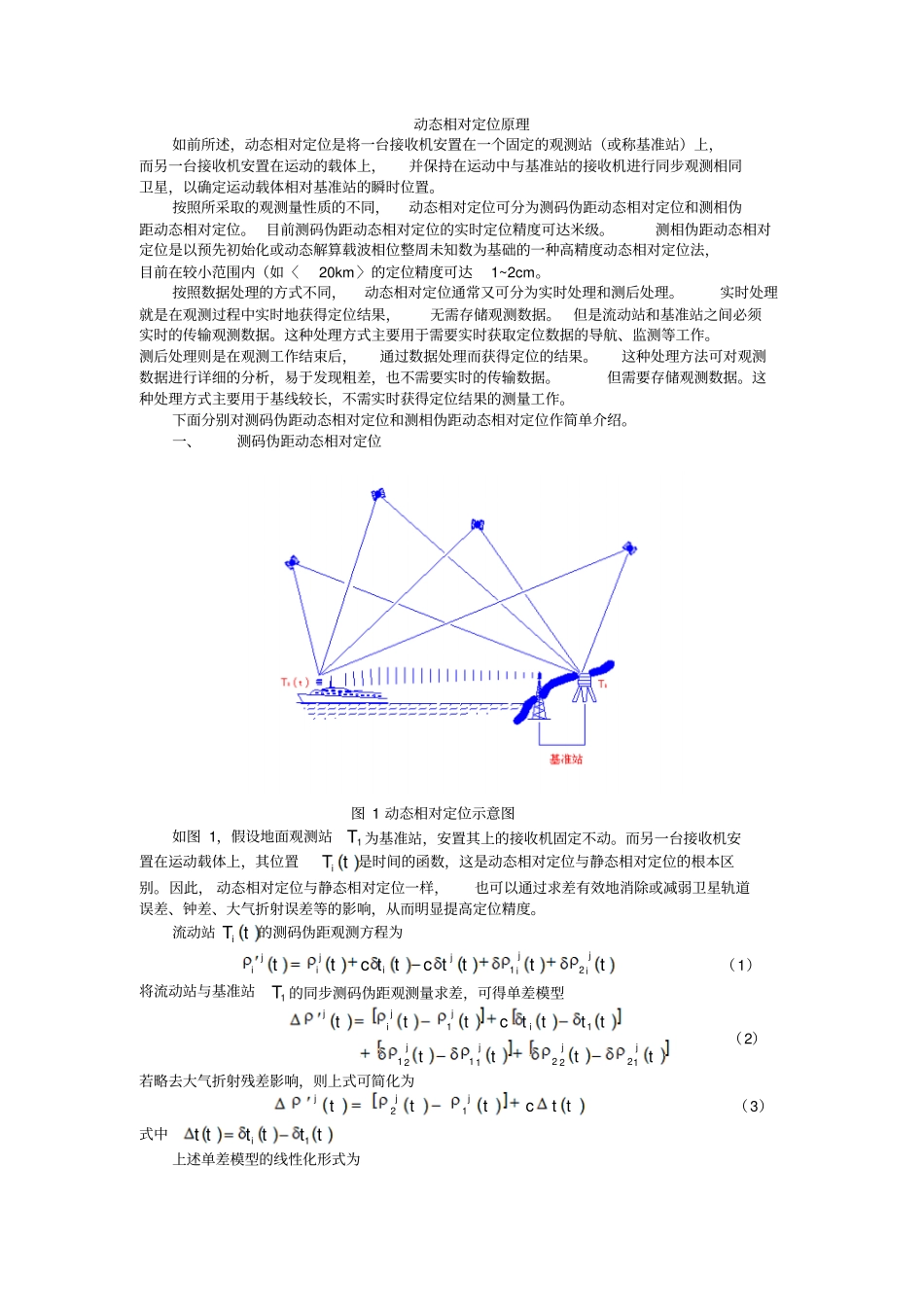
一、测码伪距动态相对定位图1动态相对定位示意图如图1,假设地面观测站1T为基准站,安置其上的接收机固定不动
而另一台接收机安置在运动载体上,其位置tTi是时间的函数,这是动态相对定位与静态相对定位的根本区别
因此,动态相对定位与静态相对定位一样,也可以通过求差有效地消除或减弱卫星轨道误差、钟差、大气折射误差等的影响,从而明显提高定位精度
流动站tTi的测码伪距观测方程为ttttcttcttjijijijiji21(1)将流动站与基准站1T的同步测码伪距观测量求差,可得单差模型ttttttttctttjjjjijjij1222112111(2)若略去大气折射残差影响,