实验一基于MATLAB的模糊控制系统设计1
1实验内容(1)基于MATLAB图形模糊推理系统设计,小费模糊推理系统;(2)飞机下降速度模糊推理系统设计;(3)水箱液位模糊控制系统设计及仿真运行
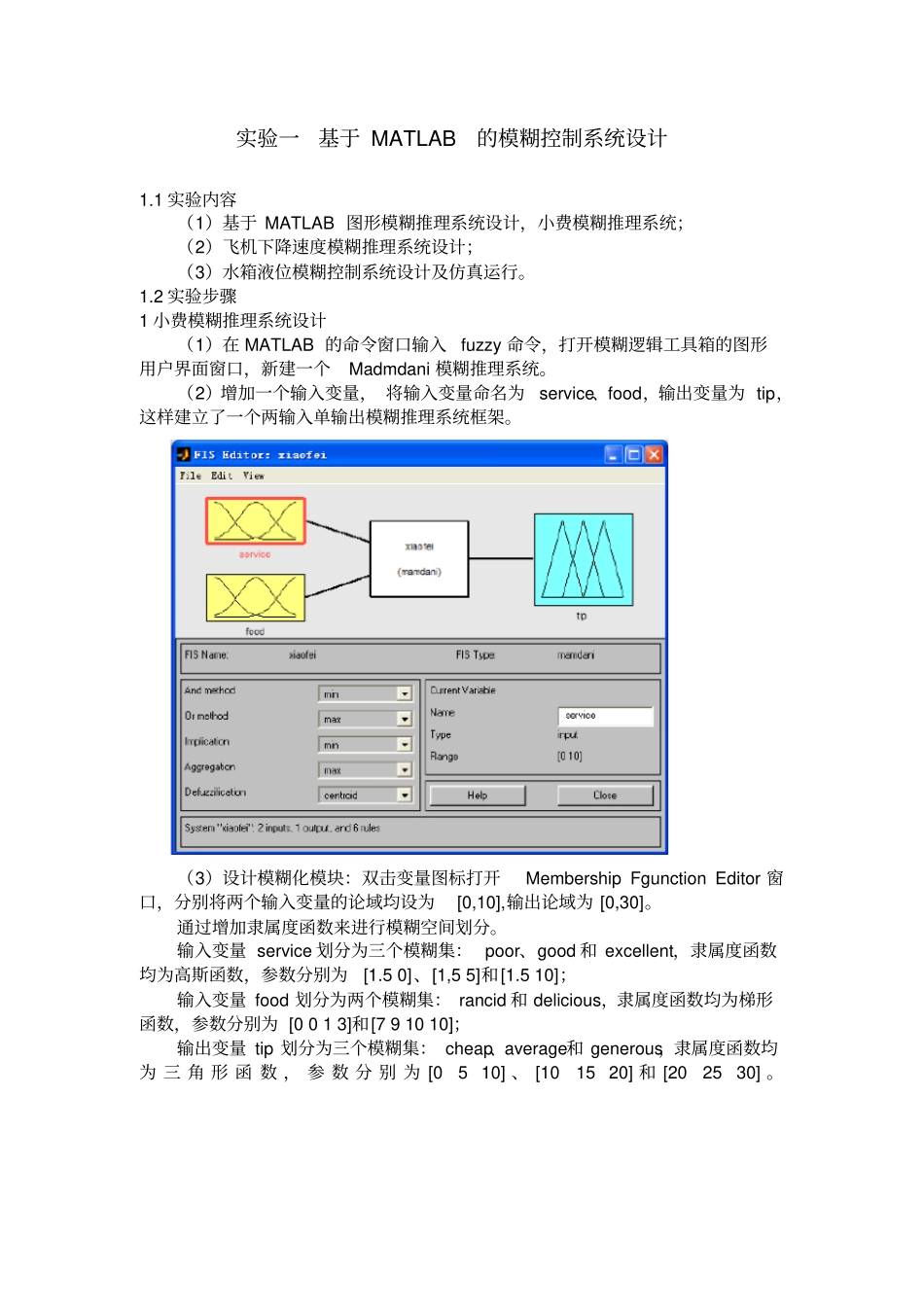
2实验步骤1小费模糊推理系统设计(1)在MATLAB的命令窗口输入fuzzy命令,打开模糊逻辑工具箱的图形用户界面窗口,新建一个Madmdani模糊推理系统
(2)增加一个输入变量,将输入变量命名为service、food,输出变量为tip,这样建立了一个两输入单输出模糊推理系统框架
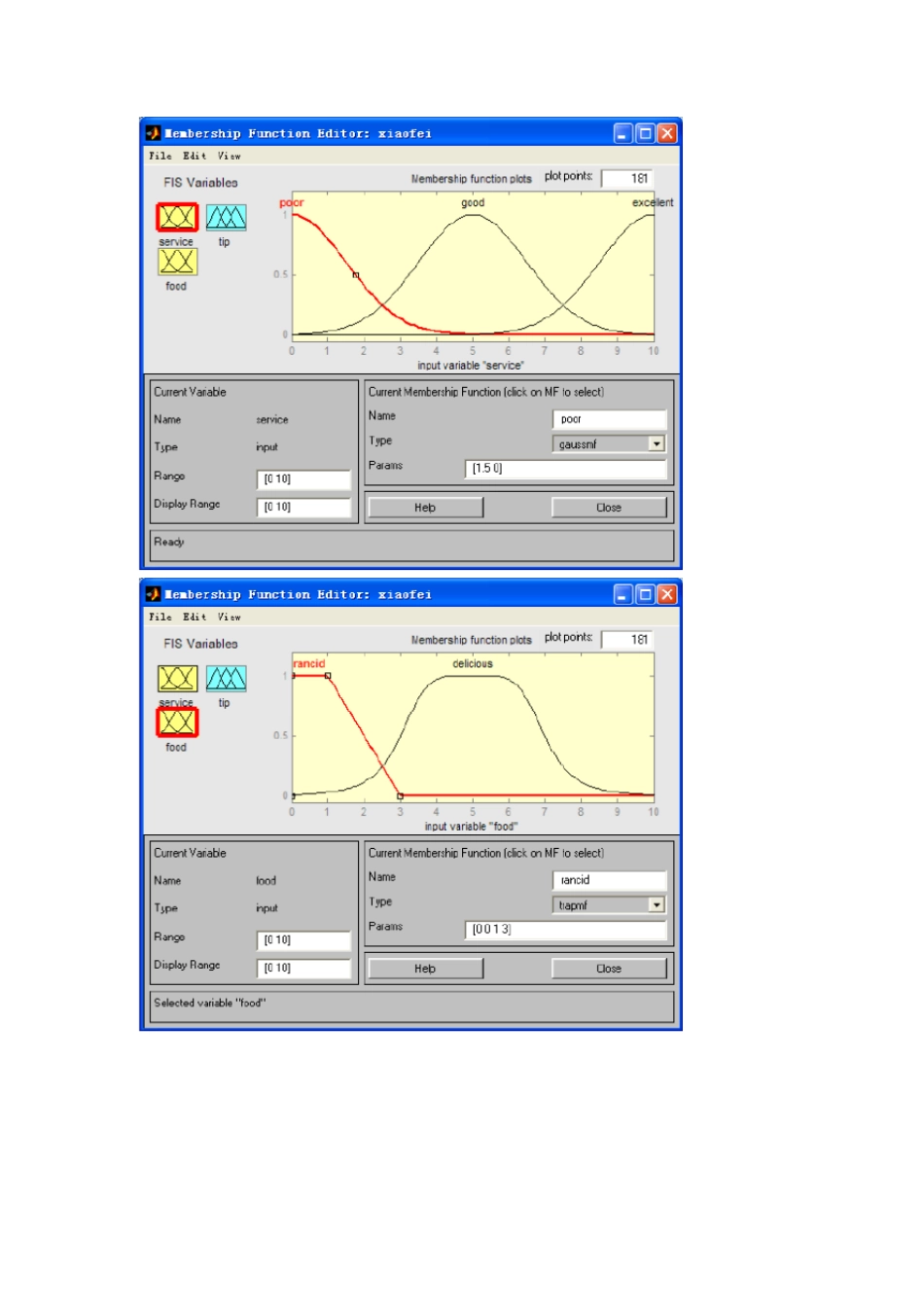
(3)设计模糊化模块:双击变量图标打开MembershipFgunctionEditor窗口,分别将两个输入变量的论域均设为[0,10],输出论域为[0,30]
通过增加隶属度函数来进行模糊空间划分
输入变量service划分为三个模糊集:poor、good和excellent,隶属度函数均为高斯函数,参数分别为[1
50]、[1,55]和[1
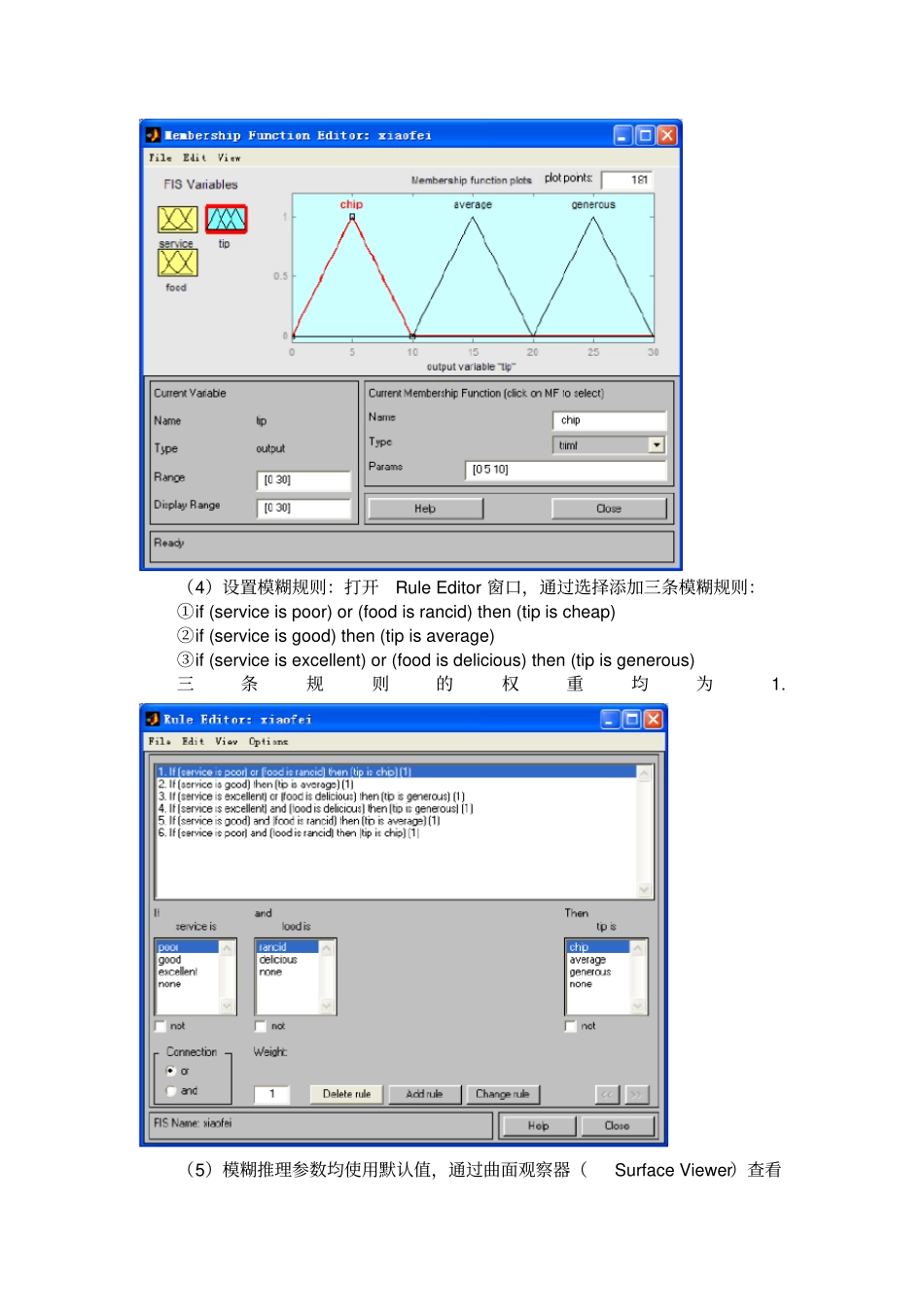
510];输入变量food划分为两个模糊集:rancid和delicious,隶属度函数均为梯形函数,参数分别为[0013]和[791010];输出变量tip划分为三个模糊集:cheap、average和generous,隶属度函数均为三角形函数,参数分别为[0510]、[101520]和[202530]
(4)设置模糊规则:打开RuleEditor窗口,通过选择添加三条模糊规则:①if(serviceispoor)or(foodisrancid)then(tipischeap)②if(serviceisgood)then(tipisaverage)③if(serviceisexcellent)or(foodisdelicious)then(tipisgenerous)三条规则的权重均为1
(5)模糊推理参数均使用默认值,通过曲面观察器(SurfaceVie