摄影测量学:对研究的物体进行摄影,量测和解译所获得的影像,获取被摄物体的几何信息和物理信息的一门科学和技术
摄影测量的三个阶段:模拟摄影测量、解析摄影测量、数字摄影测量
摄影测量解决的两大问题是几何定位和影像解译
几何定位是确定被摄物体的大小、形状和空间位置
几何定位的基本原理源于测量学的前方交会方法
常规的影像解译方法是根据地物在像片上的构像规律,采用人工判读方法识别地物的属性
航空摄影测量:利用安装在航摄飞机上的航摄仪从空中一定角度对地面进行摄影
航摄像片倾角:航摄物镜的主光轴偏离铅垂线的夹角
像片倾角保持在3°以内
航向重叠:指沿航线飞行方向两相邻像片上的重叠影像,航向重叠px%=60-65%,不得小于53%;旁向重叠:两相邻航带像片之间的影像重叠,旁向重叠py%=30-40%,不得小于15%7
摄影基线(B):在航摄曝光瞬间,相邻两摄站间的距离
基高比(B/H):摄影基线与航高的比值
基高比越大,垂直夸大越明显9
、相对航高摄影机主距像片比例尺地面距离像片距离像片比例尺HSDSf)(,d)(10
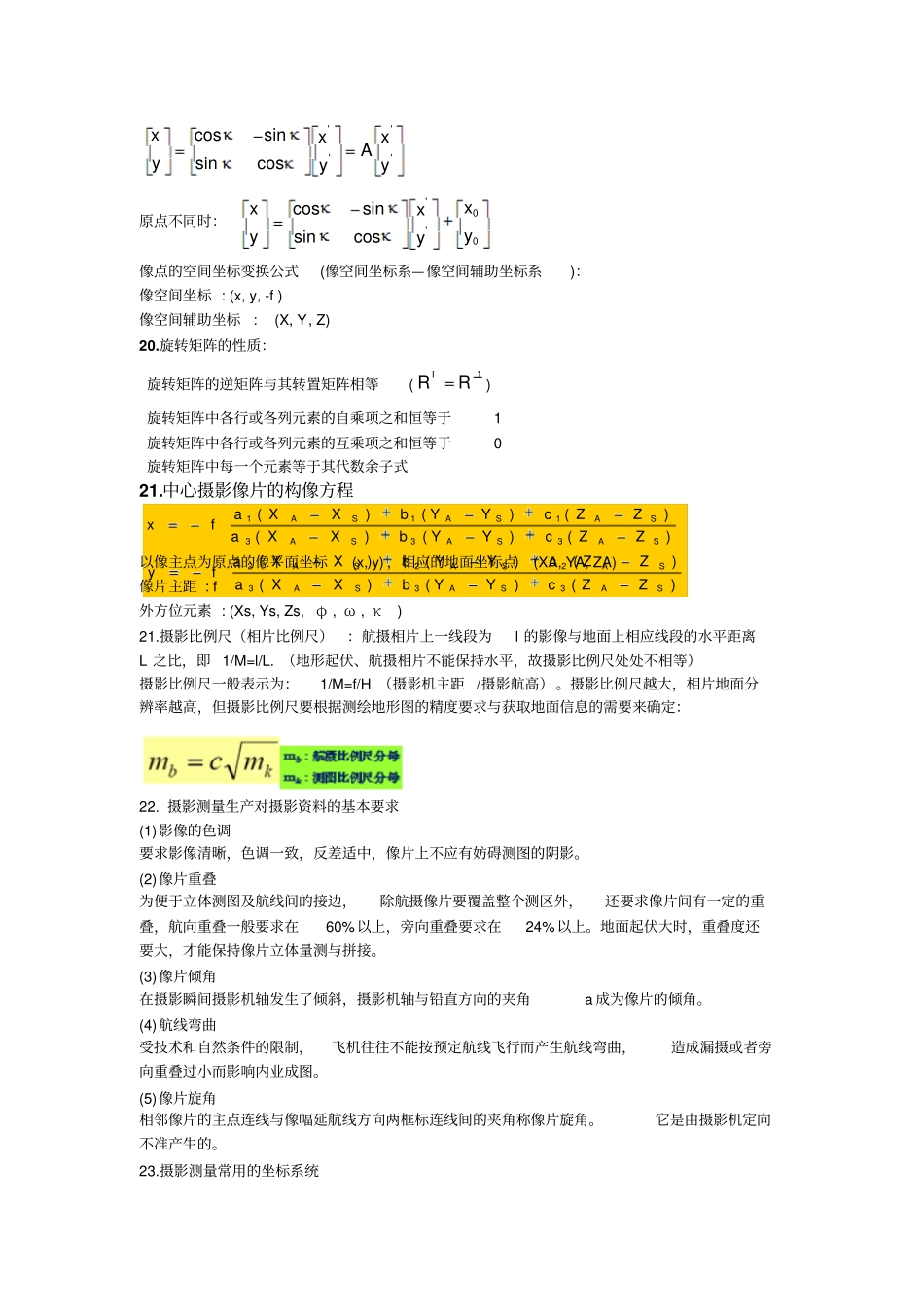
航摄比例尺的确定取决于成图比例尺,摄影比例尺与成图比例尺的关系:kbmcmbm:航摄比例尺分母km:测图比例尺分母11
航线弯曲度:航线最大弯曲矢量与航线长度之比的百分数
要求航线弯曲度