异步电动机按转子磁链定向的矢量控制系统仿真指导书一、实验目的:⒈深入理解异步电动机的矢量控制策略
⒉了解基于MATLAB仿真实现异步电动机矢量控制变频调速系统的构成
⒊掌握异步电动机矢量控制系统的分析、设计、调试方法
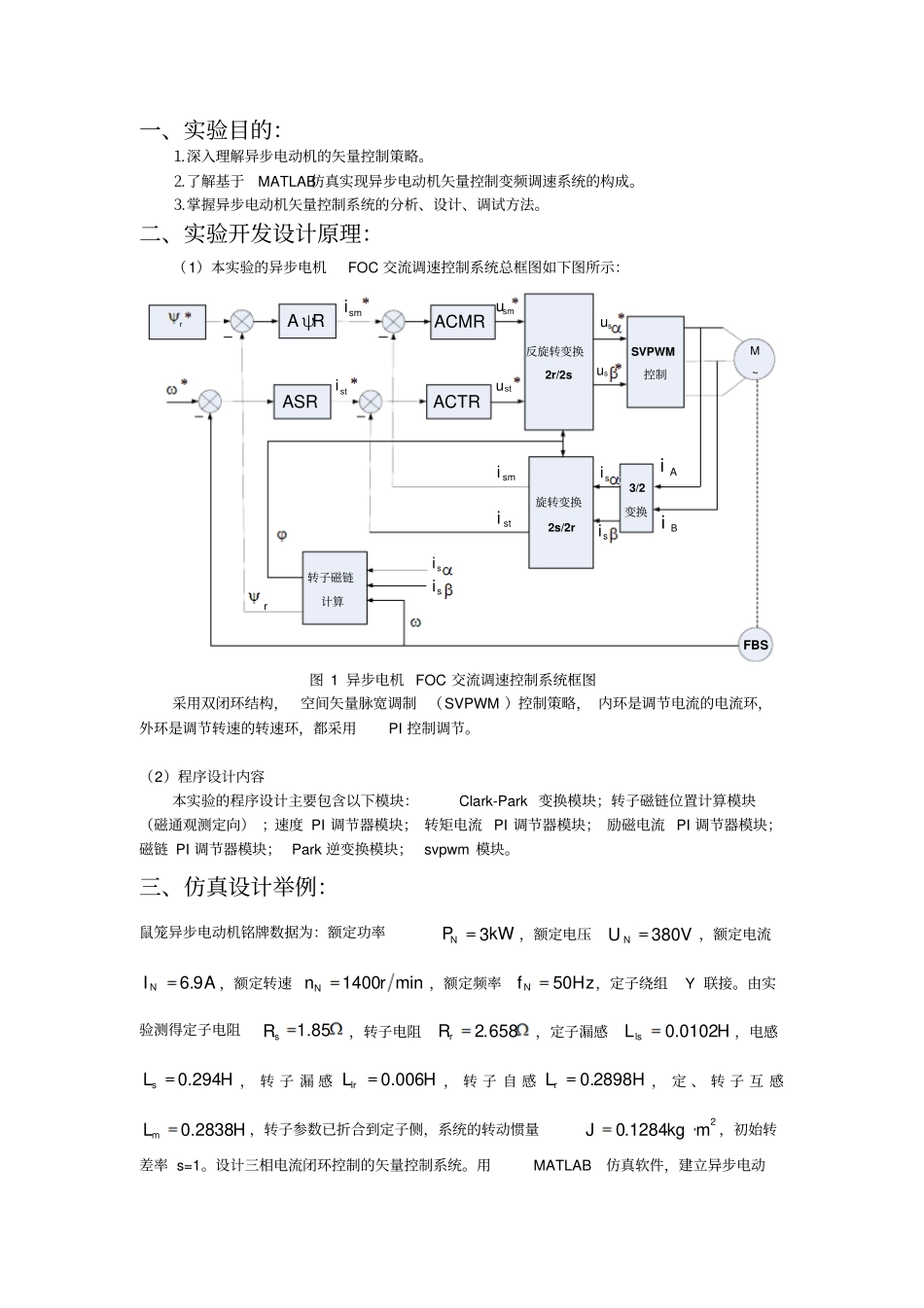
二、实验开发设计原理:(1)本实验的异步电机FOC交流调速控制系统总框图如下图所示:AψRACMRrASRACTR反旋转变换2r/2sSVPWM控制M~3/2变换AiBi旋转变换2s/2r转子磁链计算sisismistisisiFBSrsmistismustususu图1异步电机FOC交流调速控制系统框图采用双闭环结构,空间矢量脉宽调制(SVPWM)控制策略,内环是调节电流的电流环,外环是调节转速的转速环,都采用PI控制调节
(2)程序设计内容本实验的程序设计主要包含以下模块:Clark-Park变换模块;转子磁链位置计算模块(磁通观测定向);速度PI调节器模块;转矩电流PI调节器模块;励磁电流PI调节器模块;磁链PI调节器模块;Park逆变换模块;svpwm模块
三、仿真设计举例:鼠笼异步电动机铭牌数据为:额定功率kWPN3,额定电压V380NU,额定电流A9
6NI,额定转速min1400rnN,额定频率zfNH50,定子绕组Y联接
由实验测得定子电阻85
1sR,转子电阻658
2rR,定子漏感H0102
0lsL,电感H294
0sL,转子漏感H006
0lrL,转子自感H2898
0rL,定、转子互感H2838
0mL,转子参数已折合到定子侧,系统的转动惯量21284
0mkgJ,初始转差率s=1
设计三相电流闭环控制的矢量控制系统
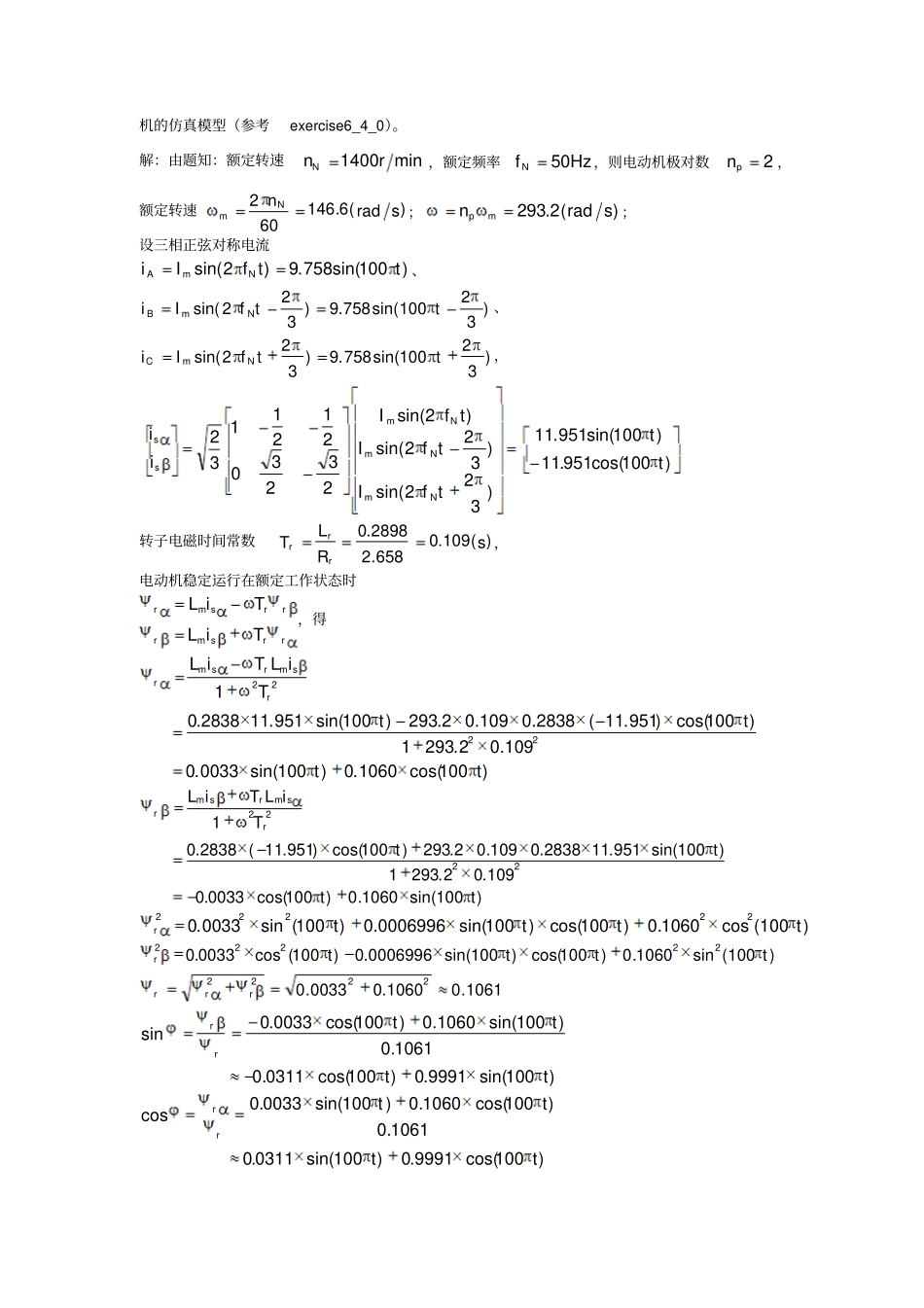
用MATLAB仿真软件,建立异步电动机的仿真模型(参考exercise6_4_0)
解:由题知:额定转速min1400rnN,额定频率zfNH50,则电动机极对数2pn,额定转速)(6
146602sradnNm;)(2