1控制理论产生及发展18世纪中叶英国第一次工业革命1765年瓦特发明蒸汽机→调速问题→稳定性问题1868年调节器一文发表1872年劳斯和1890年赫尔威茨→代数判据1892年李雅普诺夫“运动稳定性的一般问题”1932年乃奎斯特判据1948维纳发表《控制论—或关于在动物和机器中控制和通讯的科学》0
2控制理论发展三个阶段:第一代:古典控制理论(经典控制理论)40-60年代第二代:现代控制理论60-80年代第三代:智能控制及大系统理论80-至今三代控制理论对比简表古典控制理论现代控制理论智能控制理论时间20世纪40-6060-7080-至今对象单入单出线性定常系统多入多出非线性时变系统难以建模的非线性复杂系统工具传递函数;状态方程;状模糊逻辑系统(FLS),神经网2频率特性;根轨迹等频率域内求解态空间法;动态规划;极大值原理;时间域内求解络系统(NNS),专家系统(ES),知识基系统,人工智能等代表人物伯德,伊文斯卡尔曼贝尔曼庞特里亚金扎德;付京孙;Saridis,LeondesMendel0
3智能控制的产生及发展20世纪60年代Smith用模式识别器用于最优控制1965年Zadeh发表模糊集合论文,付京孙讲人工智能用于学习控制1976年Mendel提出人工智能概念—智能控制70年代初傅京孙、Gloriso和Saridis等人提出递阶智能控制的系统结构1974年马丹尼提出世界上第一个模糊控制器(fuzzylogiccontroller)20世纪80年代初建立了多种专家系统20世纪80年代中后期神经网络的研究又开始兴起1992年美国自然基金启动支持“智能控制”的研究0
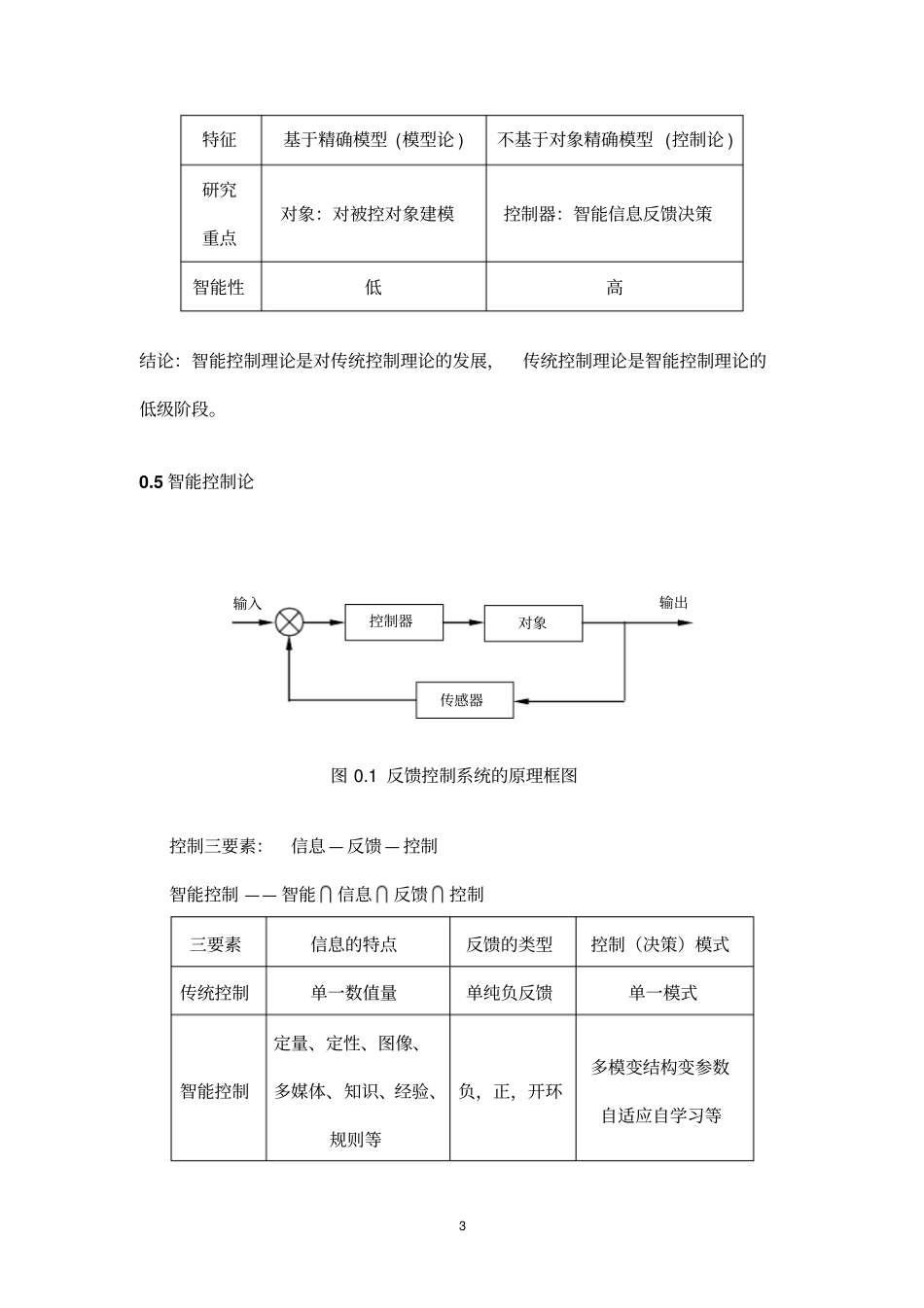
4传统控制与智能控制类别传统控制理论(古典理论与现代理论)智能控制(人工智能与控制理论交叉)3特征基于精确模型(模型论)不基于对象精确模型(控制论)研究重点对象:对被控对象建模控制器:智能信息反馈决策智