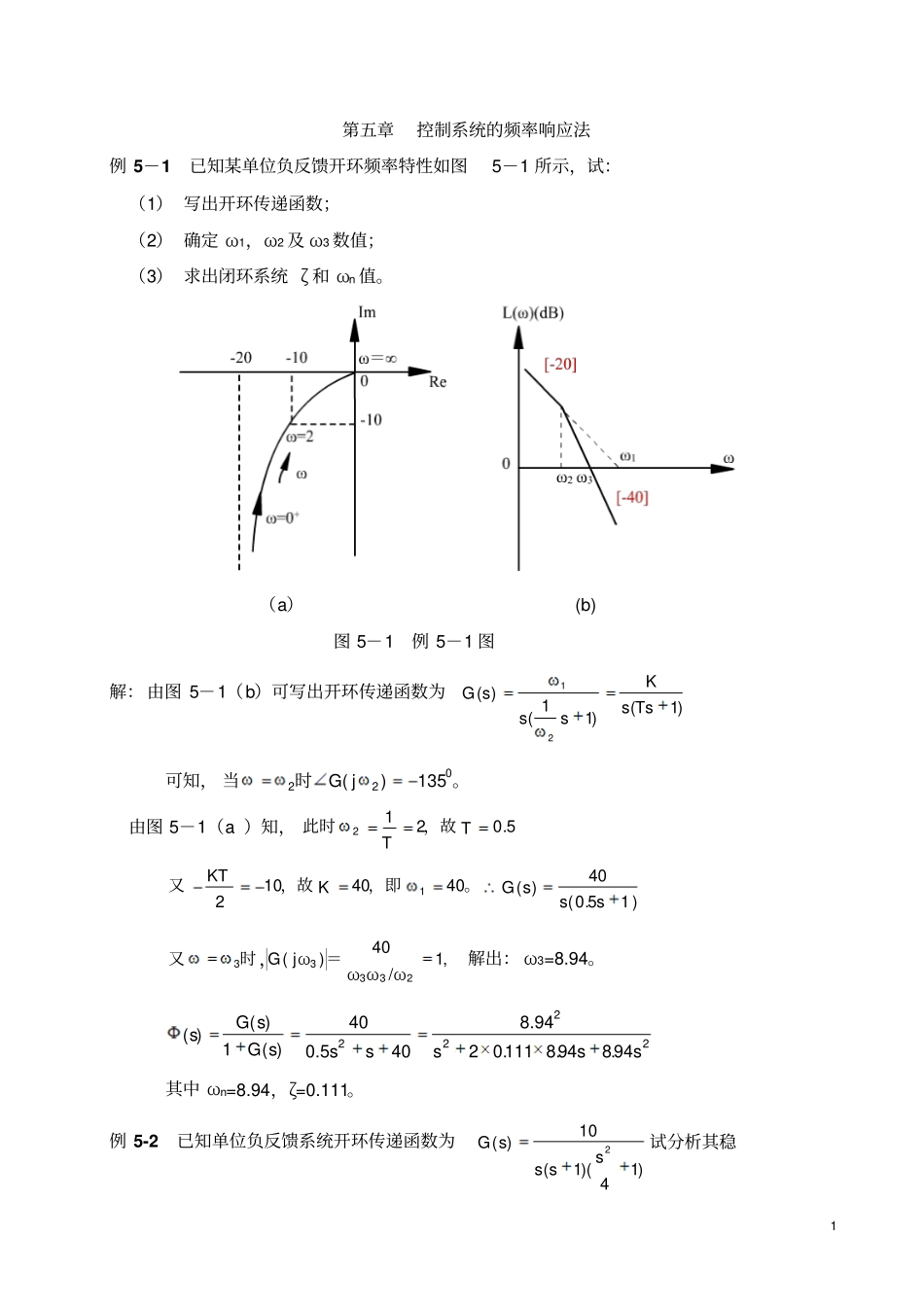
1第五章控制系统的频率响应法例5-1已知某单位负反馈开环频率特性如图5-1所示,试:(1)写出开环传递函数;(2)确定ω1,ω2及ω3数值;(3)求出闭环系统ζ和ωn值
(a)(b)图5-1例5-1图解:由图5-1(b)可写出开环传递函数为)1()11()(21TssKsssG可知,
时当022135)(jG由图5-1(a)知,5
0212TT,故此时
,即,故又40401021KKT)s
s(sG15040)(,140)(23333/ωωωjωG,=时又解出:ω3=8
22229489481110294
040)(1)()s(s
ssssGsG其中ωn=8
94,ζ=0
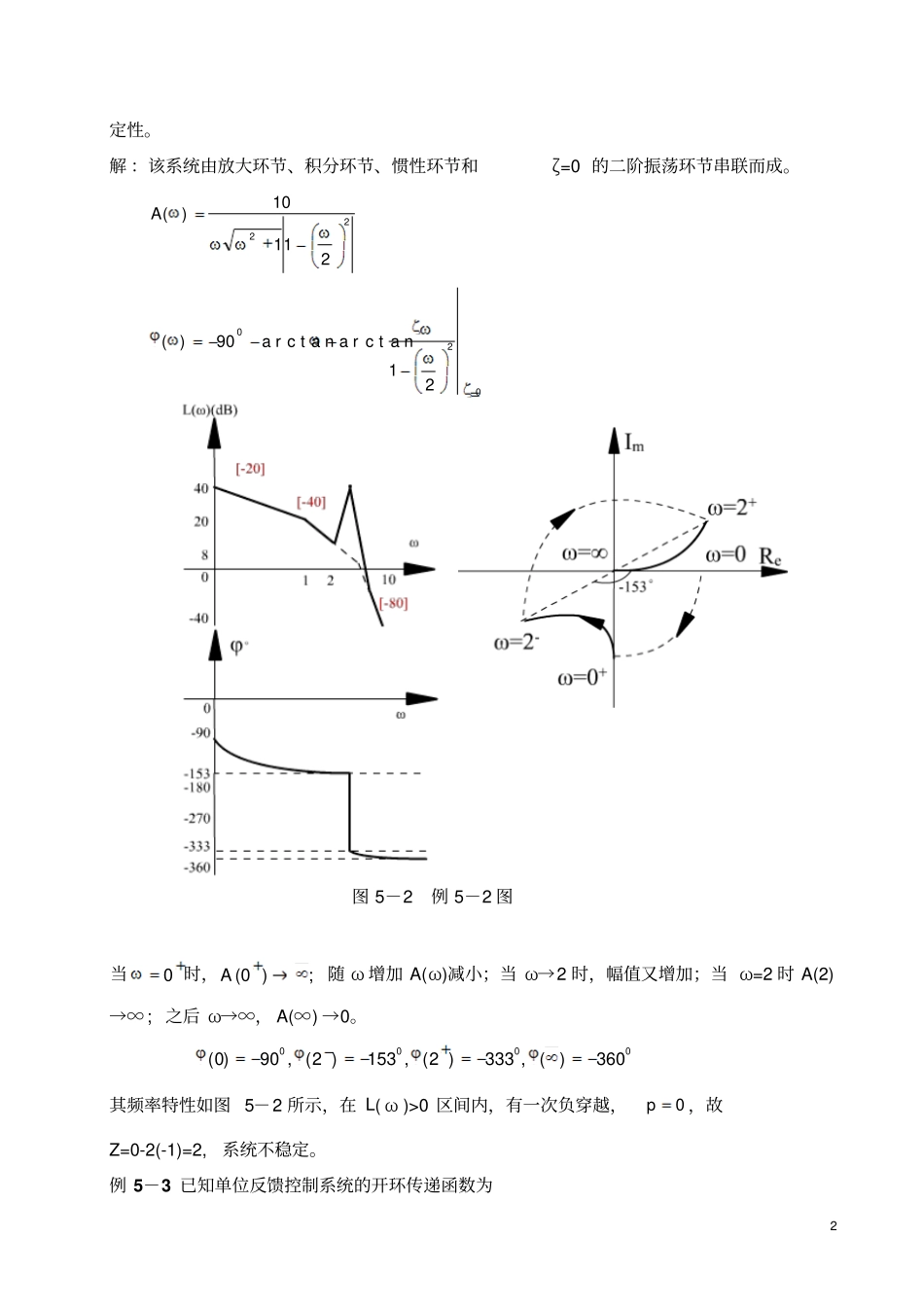
例5-2已知单位负反馈系统开环传递函数为)14)(1(10)(2ssssG试分析其稳2定性
解:该系统由放大环节、积分环节、惯性环节和ζ=0的二阶振荡环节串联而成
2221110)(A02021arctanarctan90)(图5-2例5-2图;)0(A0时,当随ω增加A(ω)减小;当ω→2时,幅值又增加;当ω=2时A(2)→∞;之后ω→∞,A(∞)→0
0000360)(,333)2(,153)2(,90)0(其频率特性如图5-2所示,在L(ω)>0区间内,有一次负穿越,0p,故Z=0-2(-1)=2,系统不稳定
例5-3已知单位反馈控制系统的开环传递函数为3)1)(5)(2()(1sssKsG试画出系统的极坐标频率特性曲线并确定系统稳定性条件
解:)1)(151)(121(52)1)(5)(2()(11sssKsssKsG)1)(1)(1(321sTsTsTK式中,
=sTsTsTKK1,2
021,103211)1)(1)(1()321ωjTωjTωjTKG(jω)1)(1)(1()1)(1)(1(223222221321ωTωTωTωjTωjTωjTK))