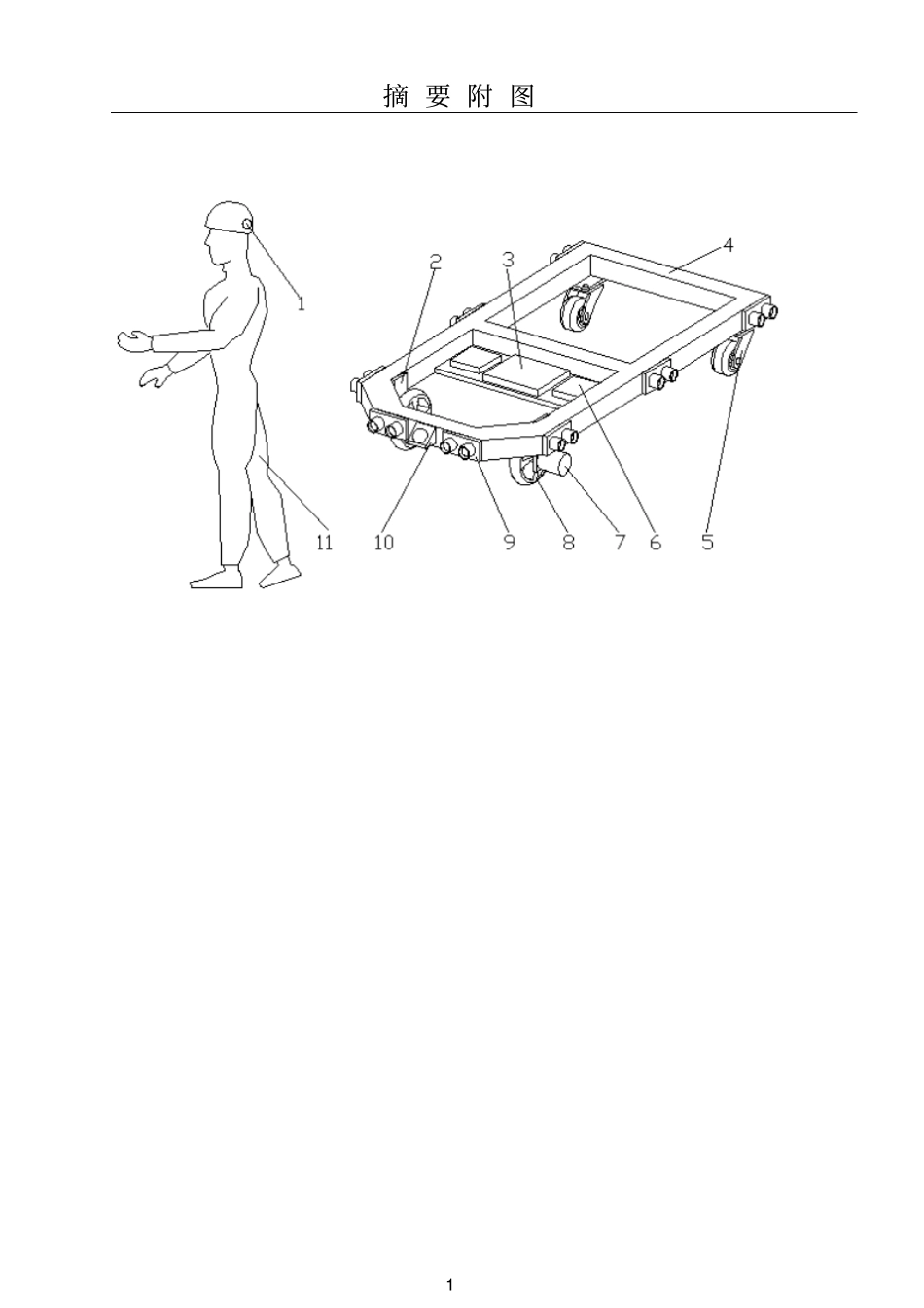
说明书摘要本发明公开了一种智能跟随防撞小车及对应的防撞方法,该小车包括车架、车轮、无线信号传感器、驱动器和控制器;车架前部下方设置有两个驱动轮,后部下方设置有两个万向轮;红外传感器包括红外线发射装置和红外线接收装置;车架前部外侧中心位置设置有红外线接收装置,红外线接收装置两侧对称地设置有两组超声波传感器,红外线发射装置为远程无线遥控装5置;驱动轮连接有所述驱动器,驱动器与控制器连接;控制器内设置有中心控制模块,和与中心控制模块信号连接的红外定位模块、超声波测距模块和驱动模块
本发明适用于机场等场合乘客行李搬运,也适合于商场的职能购物车,及大型车间的工具搬运等,具有广阔的市场前景
10摘要附图1权利要求书11、一种智能跟随防撞小车,包括车架、车轮、无线信号传感器、驱动器和控制器;其特征在于:所述车轮包括驱动轮和万向轮,所述车架前部下方设置有两个驱动轮,后部下方设置有两个万向轮;所述无线信号传感器包括红外传感器和超声波传感器,所述红外传感器包括红外线发射装置和红外线接收装置;所述车架前部外侧中心位置设置有所述红外线接收装置,所述红外线接收装置两侧对称地设置有两组所述超声波传感器,所述红外线发射装置为远程无线遥控装置;所述驱动轮连接有所述驱动器,所述驱动器与所述控制器连接;所述控制器内设置有中心控制模块,和与所述中心控制模块信号连接的红外定位模块、超声波测距模块和驱动模块
2、如权利要求1所述的智能跟随防撞小车,其特征在于:其还包括一雷达,所述雷达的工作电压范围为3
3V-20V直流电,发射功率≦2mW
3、如权利要求1所述的智能跟随防撞小车,其特征在于:所述超声波测距模块的工作电压范围为2
5V直流电,探测距离为2cm-450cm
4、如权利要求1所述的智能跟随防撞小车,其特征在于:所述驱动模块采用L298N双H桥直流电机驱动芯片
5、如权利要求1所述的智能跟随防撞小