计算机控制技术--基于Matlab的最少拍控制系统设计学院:计算机科学与技术班级:计科0902班学号:姓名:指导老师:日期:2012年12月15日一、实验目的:1.学习使用Matlab设计最少拍控系统的方法;二、实验工具:X86系统兼容型计算机、MATLAB软件
三、实验内容:1.实验原理最少拍设计,是指系统在典型输入信号(如阶跃信号、速度信号、加速度信号等)作用下,经过最少拍(有限拍)使系统输出的系统稳态误差为零
因此,最少拍控制系统也称最少拍无差系统或最少拍随动系统,它实质上是时间最优控制系统,系统的性能指标就是系统调节时间最短或尽可能短,即对闭环Z传递函数要求快速性和准确性
下面以一个具体实例介绍最少拍系统的设计和仿真
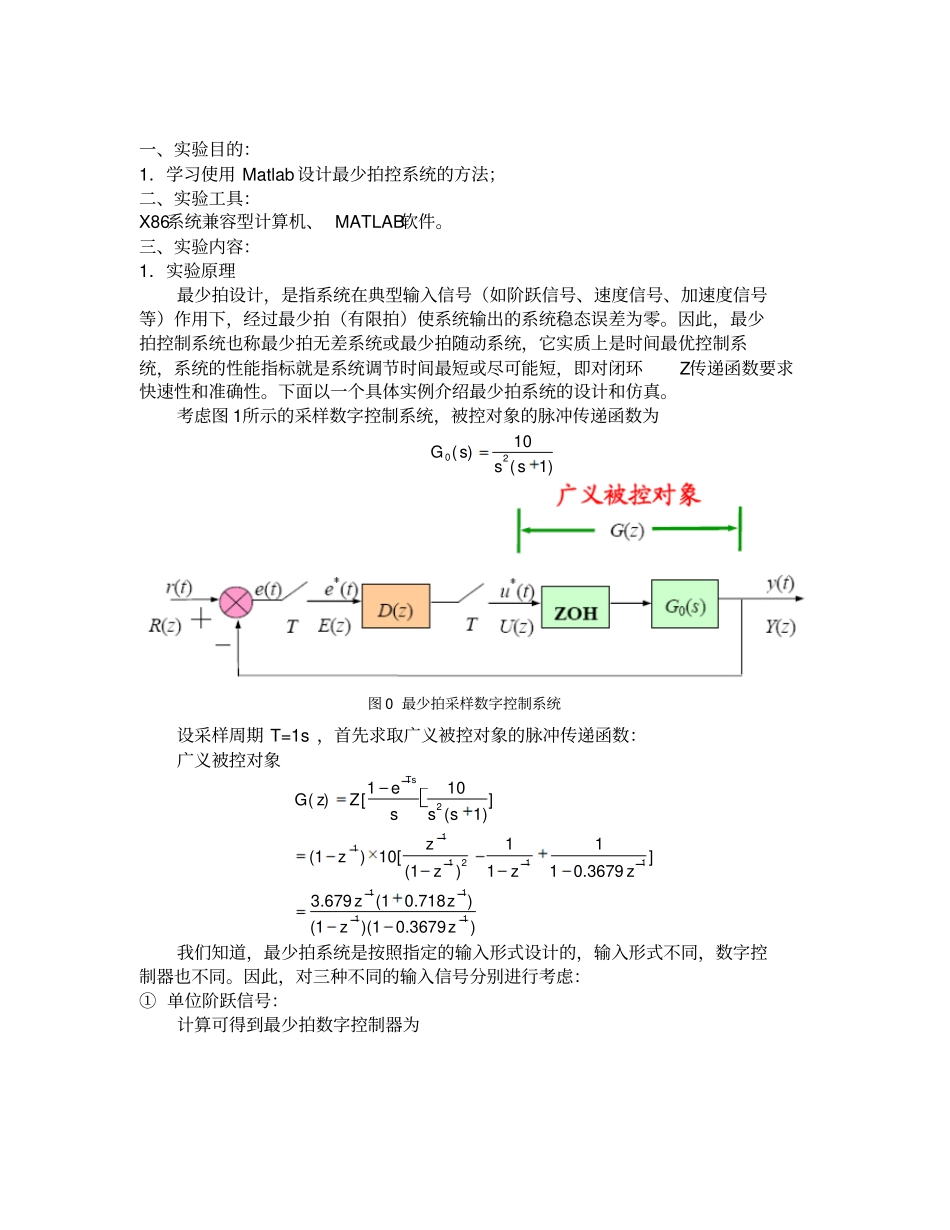
考虑图1所示的采样数字控制系统,被控对象的脉冲传递函数为0210G()(1)sss图0最少拍采样数字控制系统设采样周期T=1s,首先求取广义被控对象的脉冲传递函数:广义被控对象21112111111110()[](1)11(1)10[](1)110
679(10
718)(1)(10
3679)TseGzZssszzzzzzzzz我们知道,最少拍系统是按照指定的输入形式设计的,输入形式不同,数字控制器也不同
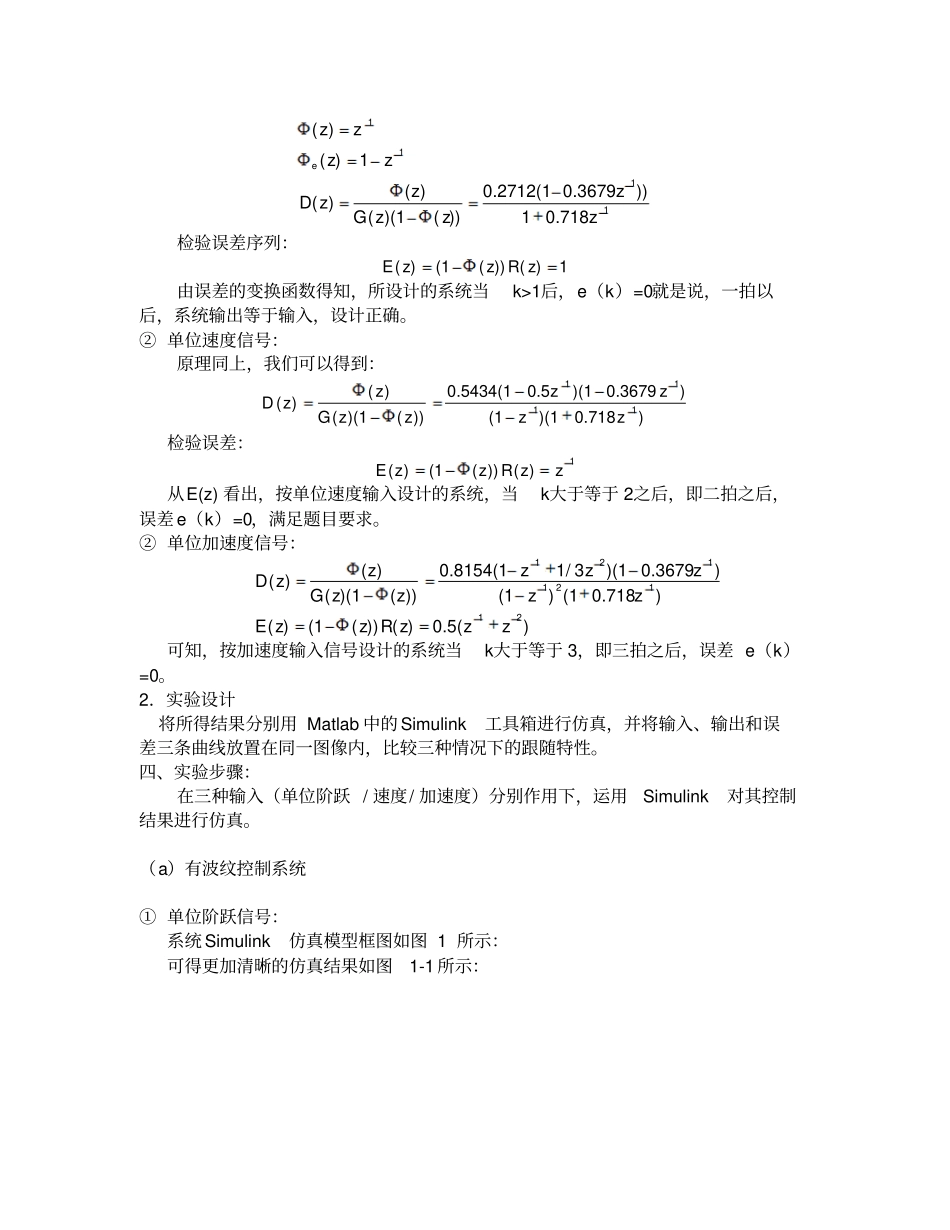
因此,对三种不同的输入信号分别进行考虑:①单位阶跃信号:计算可得到最少拍数字控制器为1111()()1()0
2712(10
3679))()()(1())10
718ezzzzzzDzGzzz检验误差序列:()(1())()1EzzRz由误差的变换函数得知,所设计的系统当k>1后,e(k)=0就是说,一拍以后,系统输出等于输入,设计正确
②单位速度信号:原理同上,我们可以得到:1111()0
5434(10
3679)()()(1())(1)(10
718)zzzDzGzzzz检验误差:1()(1())()EzzRzz从E