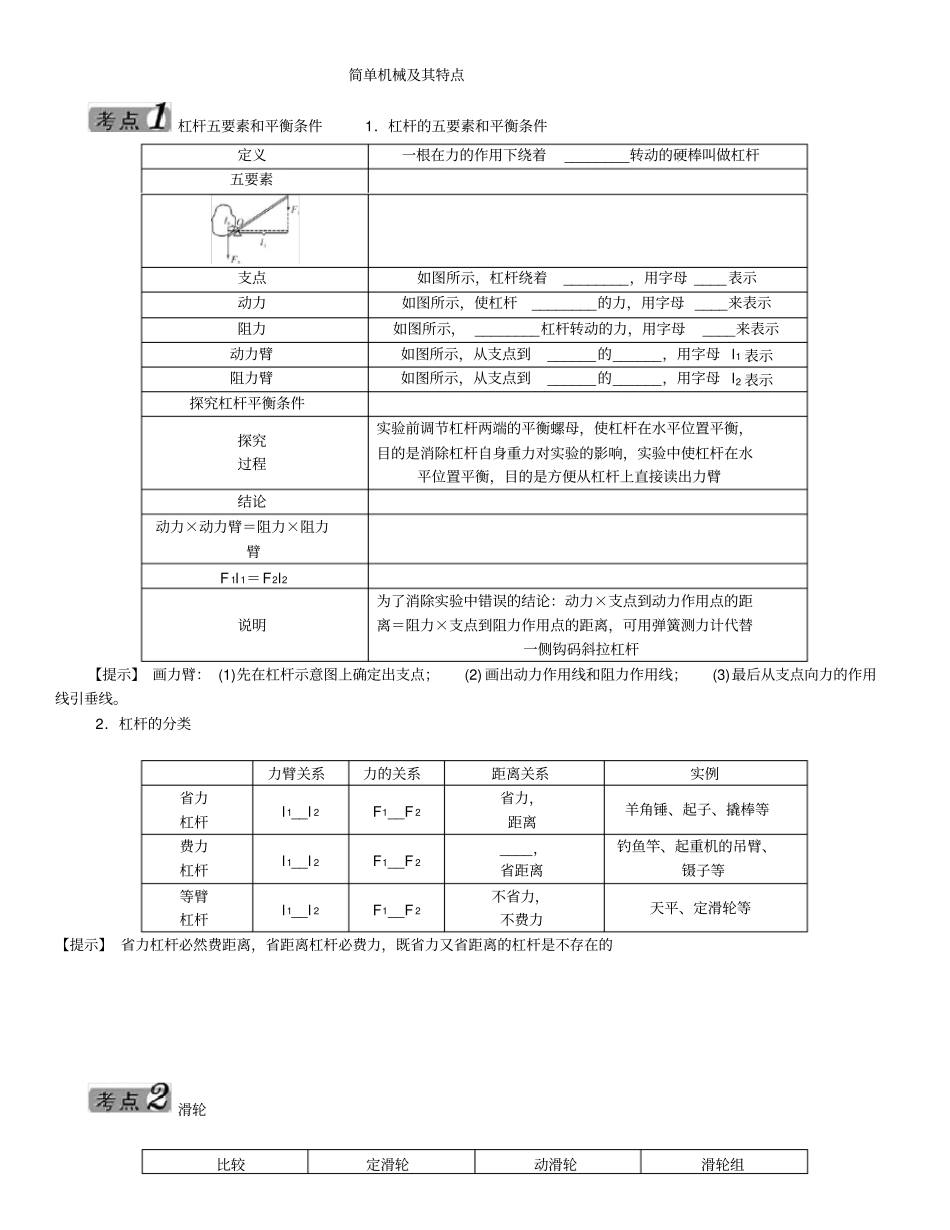
简单机械及其特点杠杆五要素和平衡条件1.杠杆的五要素和平衡条件定义一根在力的作用下绕着________转动的硬棒叫做杠杆五要素支点如图所示,杠杆绕着________,用字母____表示动力如图所示,使杠杆________的力,用字母____来表示阻力如图所示,________杠杆转动的力,用字母____来表示动力臂如图所示,从支点到______的______,用字母l1表示阻力臂如图所示,从支点到______的______,用字母l2表示探究杠杆平衡条件探究过程实验前调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,目的是消除杠杆自身重力对实验的影响,实验中使杠杆在水平位置平衡,目的是方便从杠杆上直接读出力臂结论动力×动力臂=阻力×阻力臂F1l1=F2l2说明为了消除实验中错误的结论:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,可用弹簧测力计代替一侧钩码斜拉杠杆【提示】画力臂:(1)先在杠杆示意图上确定出支点;(2)画出动力作用线和阻力作用线;(3)最后从支点向力的作用线引垂线
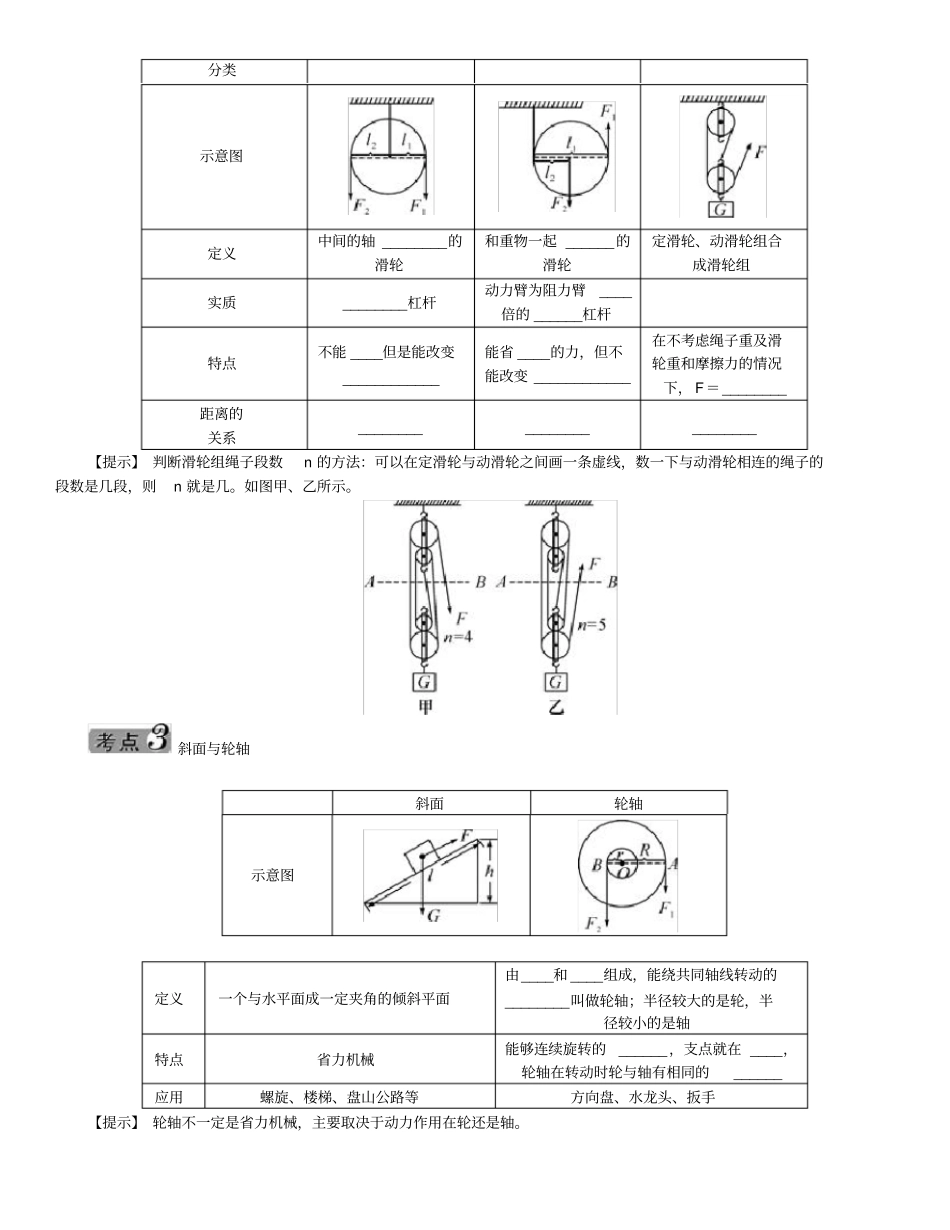
2.杠杆的分类力臂关系力的关系距离关系实例省力杠杆l1__l2F1__F2省力,距离羊角锤、起子、撬棒等费力杠杆l1__l2F1__F2____,省距离钓鱼竿、起重机的吊臂、镊子等等臂杠杆l1__l2F1__F2不省力,不费力天平、定滑轮等【提示】省力杠杆必然费距离,省距离杠杆必费力,既省力又省距离的杠杆是不存在的滑轮比较定滑轮动滑轮滑轮组分类示意图定义中间的轴________的滑轮和重物一起______的滑轮定滑轮、动滑轮组合成滑轮组实质________杠杆动力臂为阻力臂____倍的______杠杆特点不能____但是能改变____________能省____的力,但不能改变____________在不考虑绳子重及滑轮重和摩擦力的情况下,F=________距离的关系_________