实验四四节传送带的模拟控制一、实验目的用PLC构成四节传送带控制系统二、实验内容1.控制要求(选做其中之一)(1)可以自行拟定传送带的工作模式,并编程实现(2)起动后,先起动最末的皮带机(M4),1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止
2.I/O分配输入输出起动按钮:I0
0M1:Q0
1停止按钮:I0
5M2:Q0
2负载或故障A:I0
1M3:Q0
3负载或故障B:I0
2M4:Q0
4负载或故障C:I0
3负载或故障D:I0
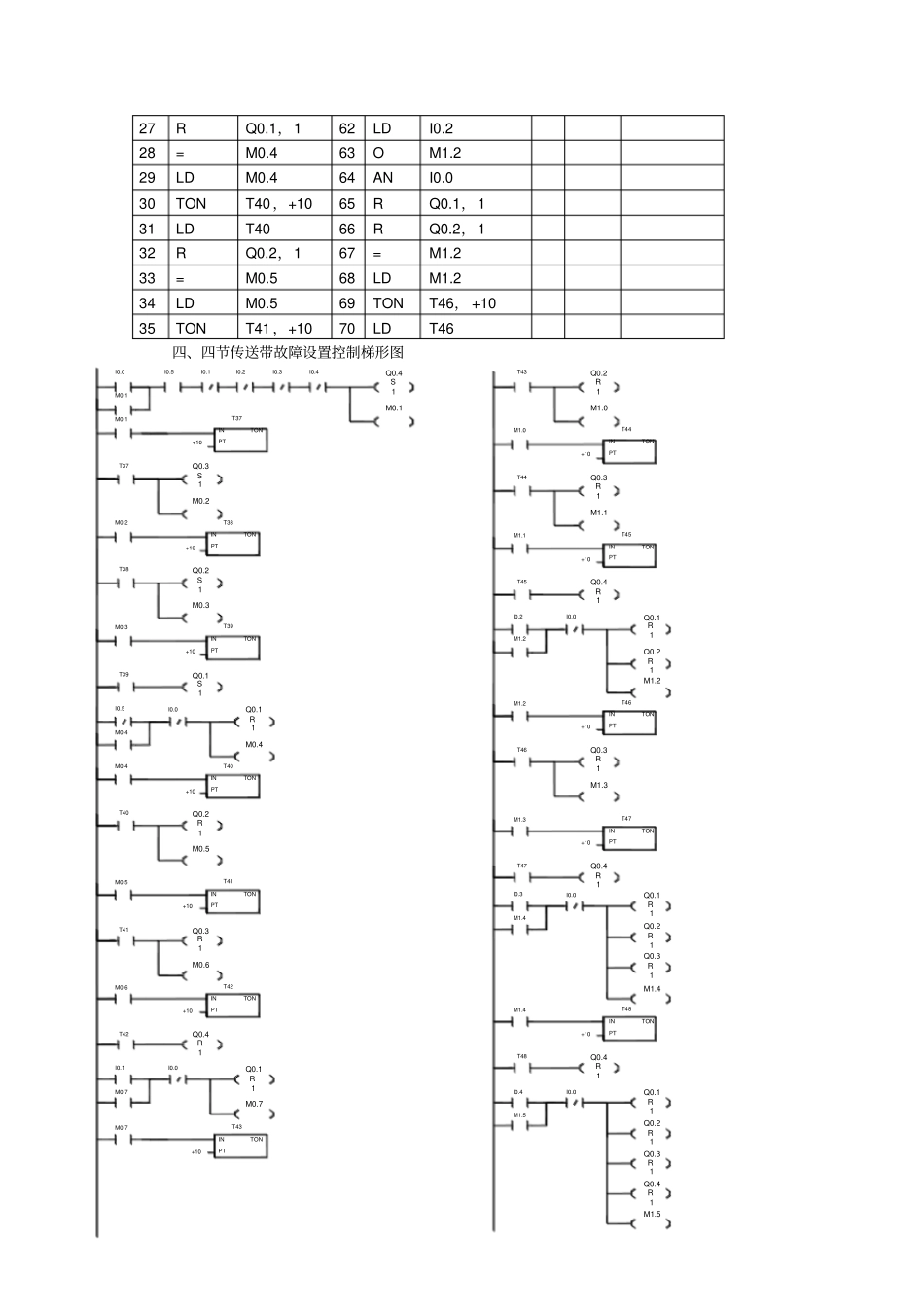
43.梯形图输入程序
4.调试并运行程序
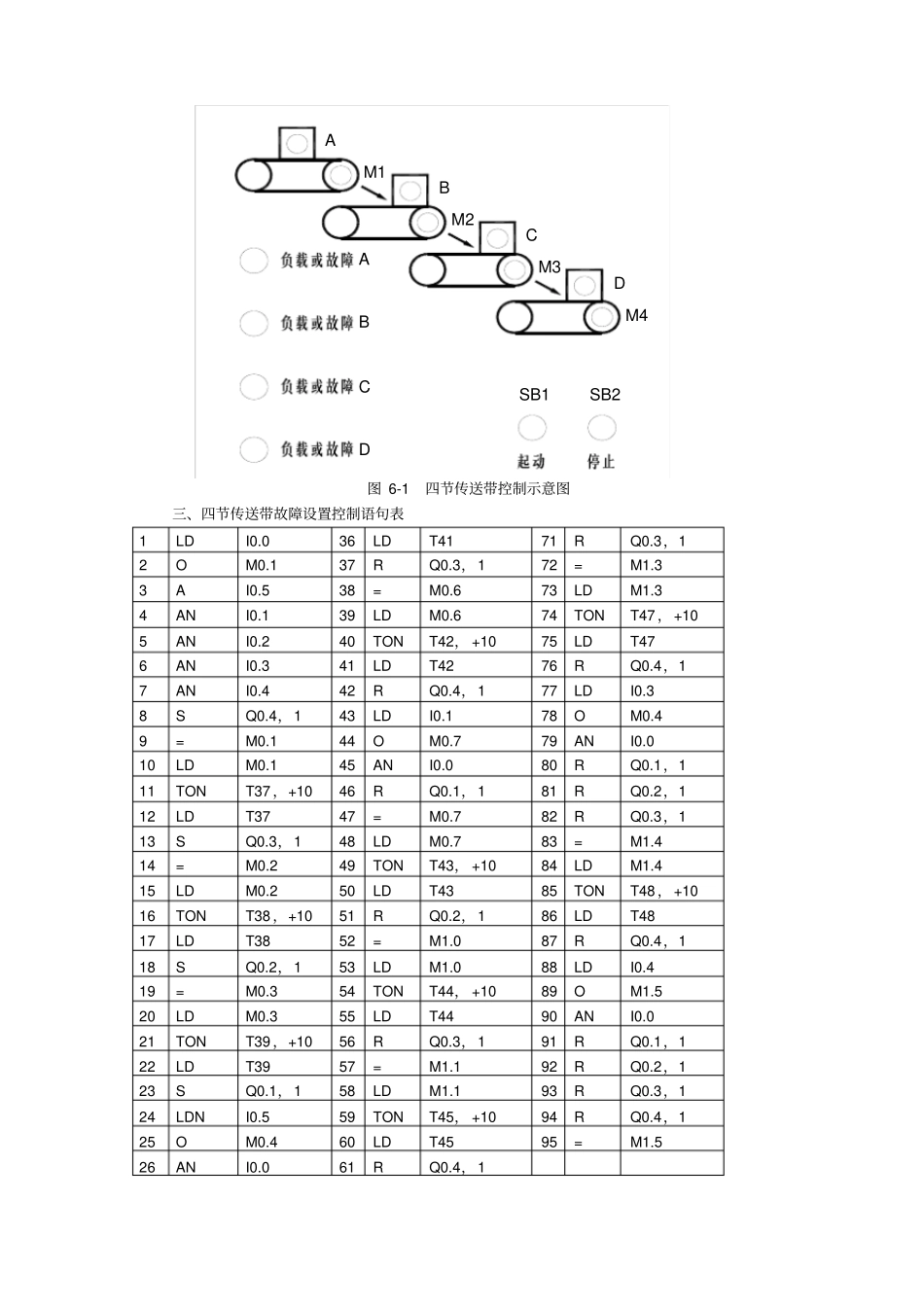
M1M2M3M4ABCDABCDSB1SB2图6-1四节传送带控制示意图三、四节传送带故障设置控制语句表1LDI0
036LDT4171RQ0
3,12OM0
137RQ0
3,172=M1
538=M0
673LDM1
34ANI0
139LDM0
674TONT47,+105ANI0
240TONT42,+1075LDT476ANI0
341LDT4276RQ0
4,17ANI0
442RQ0
4,177LDI0
4,143LDI0
178OM0
144OM0
779ANI0
010LDM0
145ANI0
080RQ0
1,111TONT37,+1046RQ0
1,181RQ0
2,112LDT3747=M0
782RQ0
3,113SQ0
3,148LDM0
783=M1
414=M0
249TONT43,+1084LDM1
415LDM0
250LDT4385TONT48,+1016TONT38,+1051RQ0
2,186LDT4817LDT3852=M1
087RQ0
4,118SQ0
2,153LDM1
088LDI0
419=M0