全等三角形与旋转模型归纳考察点1:手拉手模型手拉手模型,亦称为共顶点等腰型,一定会出现旋转型全等
其衍生模型有等腰对补角模型和等腰旁等角模型模型回顾:一
绕点旋转三.等腰旁等角型四等腰对补角型1
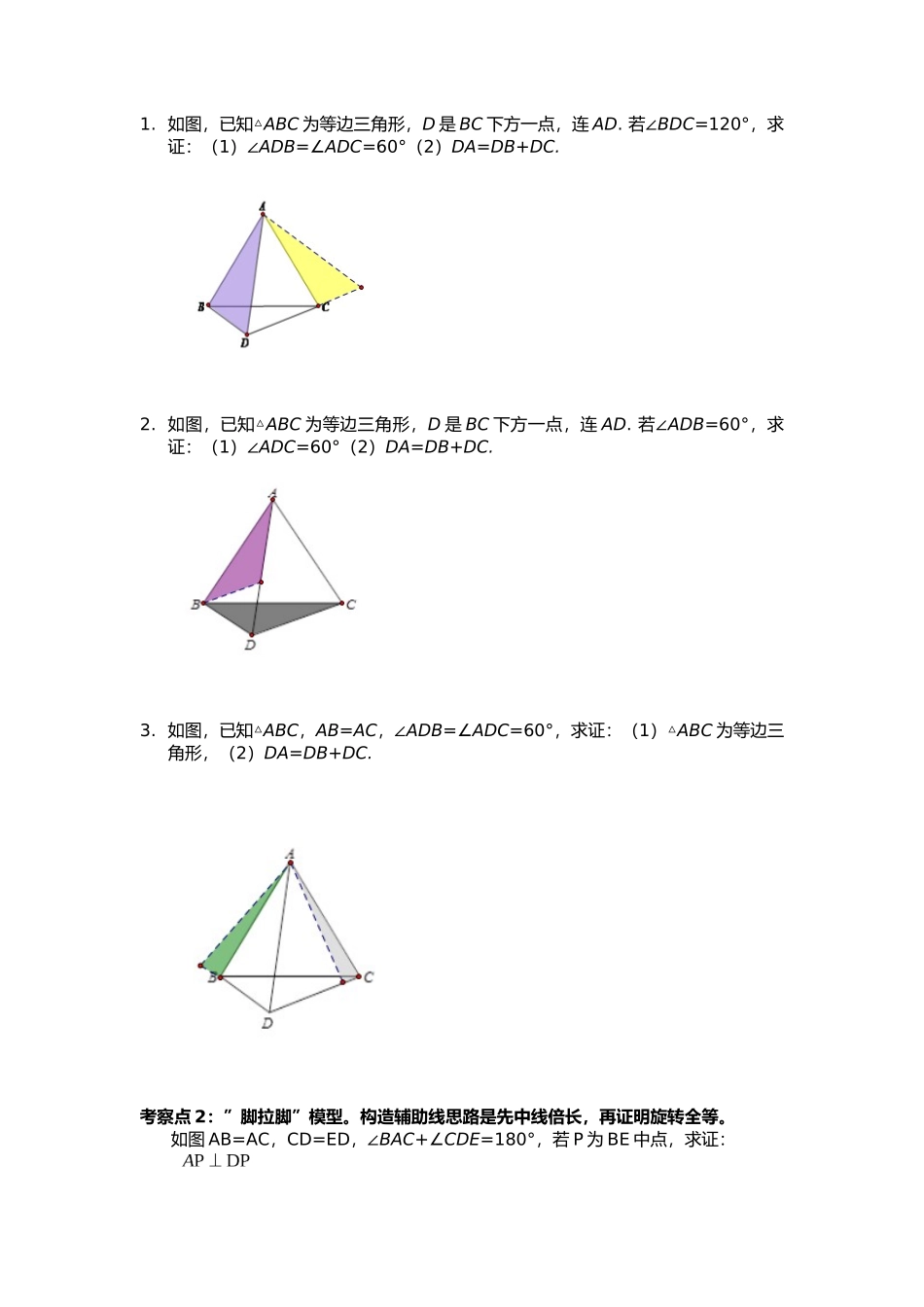
如图,已知△ABC为等边三角形,D是BC下方一点,连AD
若∠BDC=120°,求证:(1)∠ADB=∠ADC=60°(2)DA=DB+DC
如图,已知△ABC为等边三角形,D是BC下方一点,连AD
若∠ADB=60°,求证:(1)∠ADC=60°(2)DA=DB+DC
如图,已知△ABC,AB=AC,∠ADB=∠ADC=60°,求证:(1)△ABC为等边三角形,(2)DA=DB+DC
考察点2:”脚拉脚”模型
构造辅助线思路是先中线倍长,再证明旋转全等
如图AB=AC,CD=ED,∠BAC+∠CDE=180°,若P为BE中点,求证:如图,∠A+∠C=180°,E,F分别在BC,CD上,且AB=BE,AD=DF,M为EF中点,求证:DM⊥BM巩固练习如图,已知等边△ABC,D是BC上任意一点,以AD为边作等边△ADE,连CE,求证:(1)CD+CE=AC,(2)CE是△ABC的外角平分线
如图,已知△ABC,以AB、AC为边作正△ABD和正△ACE,CD交BE于O,连OA,求的值
(1)如图1,AB=AC,D为BC上一点,DA=DE,∠BAC=∠ADE=90°,求∠BCE的度数.(2)如图2,AB=AC,D为BC上一点,DA=DE,∠BAC=∠ADE=α°(α