1机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一
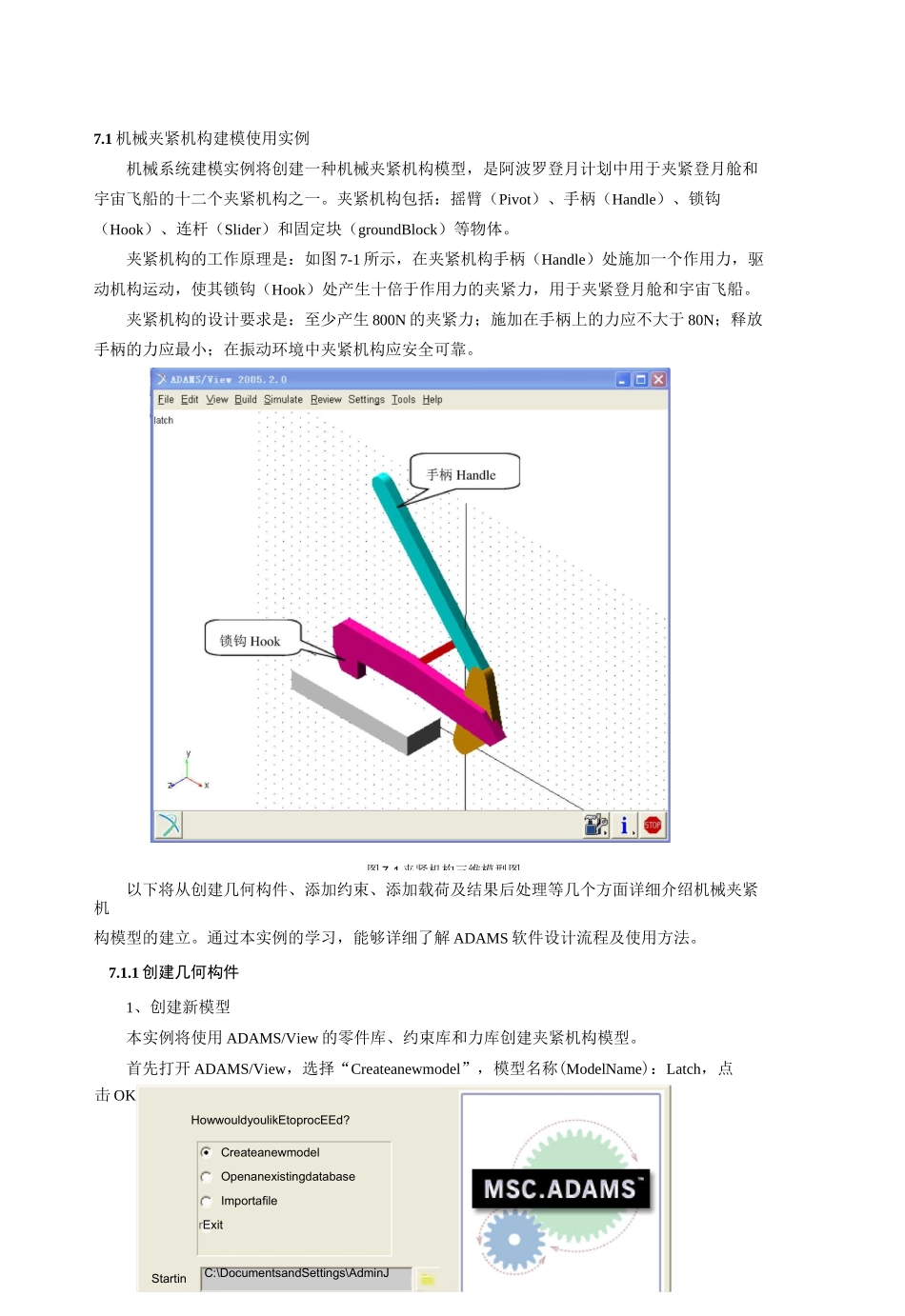
夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(groundBlock)等物体
夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船
夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不大于80N;释放手柄的力应最小;在振动环境中夹紧机构应安全可靠
以下将从创建几何构件、添加约束、添加载荷及结果后处理等几个方面详细介绍机械夹紧机构模型的建立
通过本实例的学习,能够详细了解ADAMS软件设计流程及使用方法
1创建几何构件1、创建新模型本实例将使用ADAMS/View的零件库、约束库和力库创建夹紧机构模型
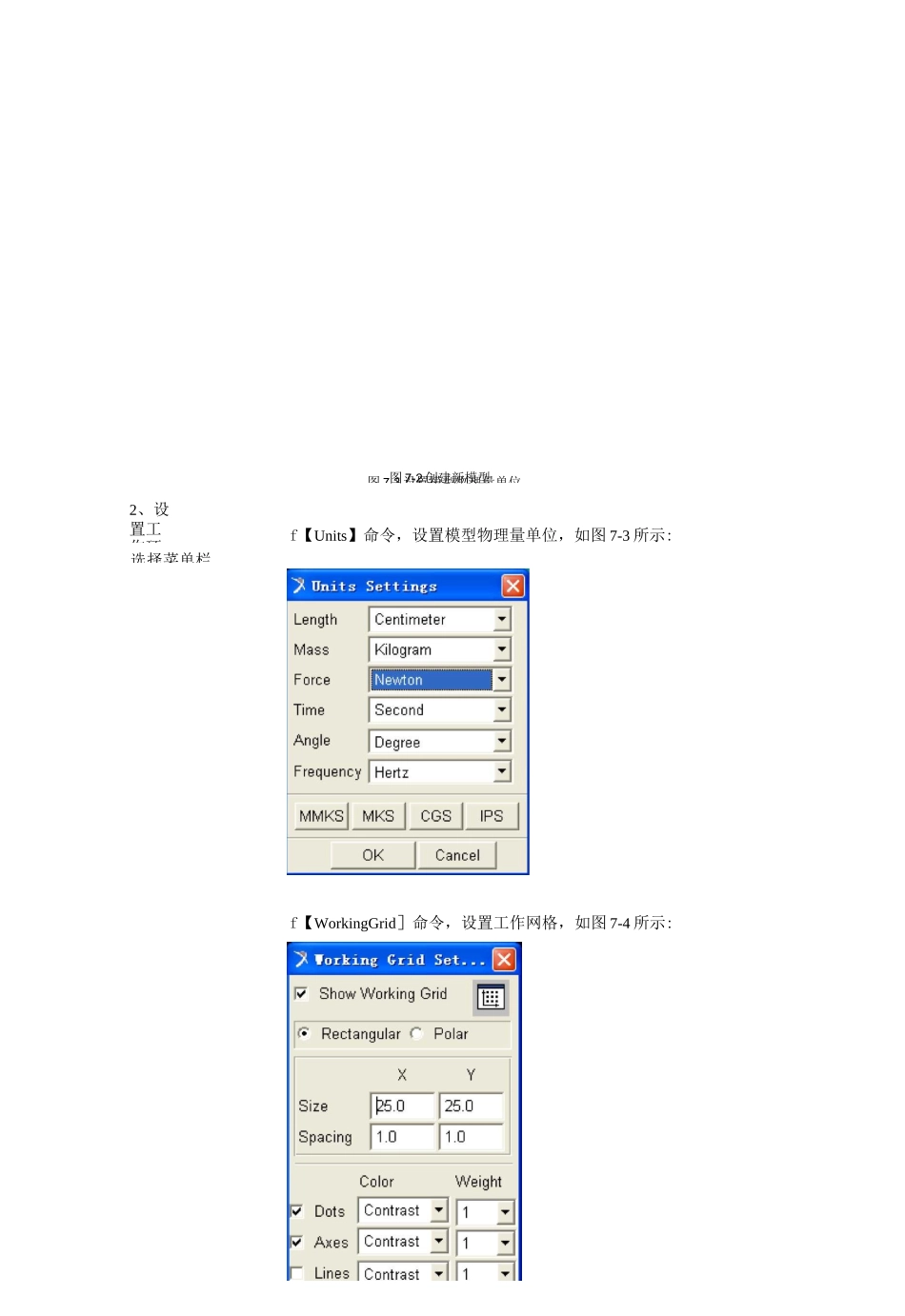
首先打开ADAMS/View,选择“Createanewmodel”,模型名称(ModelName):Latch,点图7-1夹紧机构三维模型图击OKHowwouldyoulikEtoprocEEd
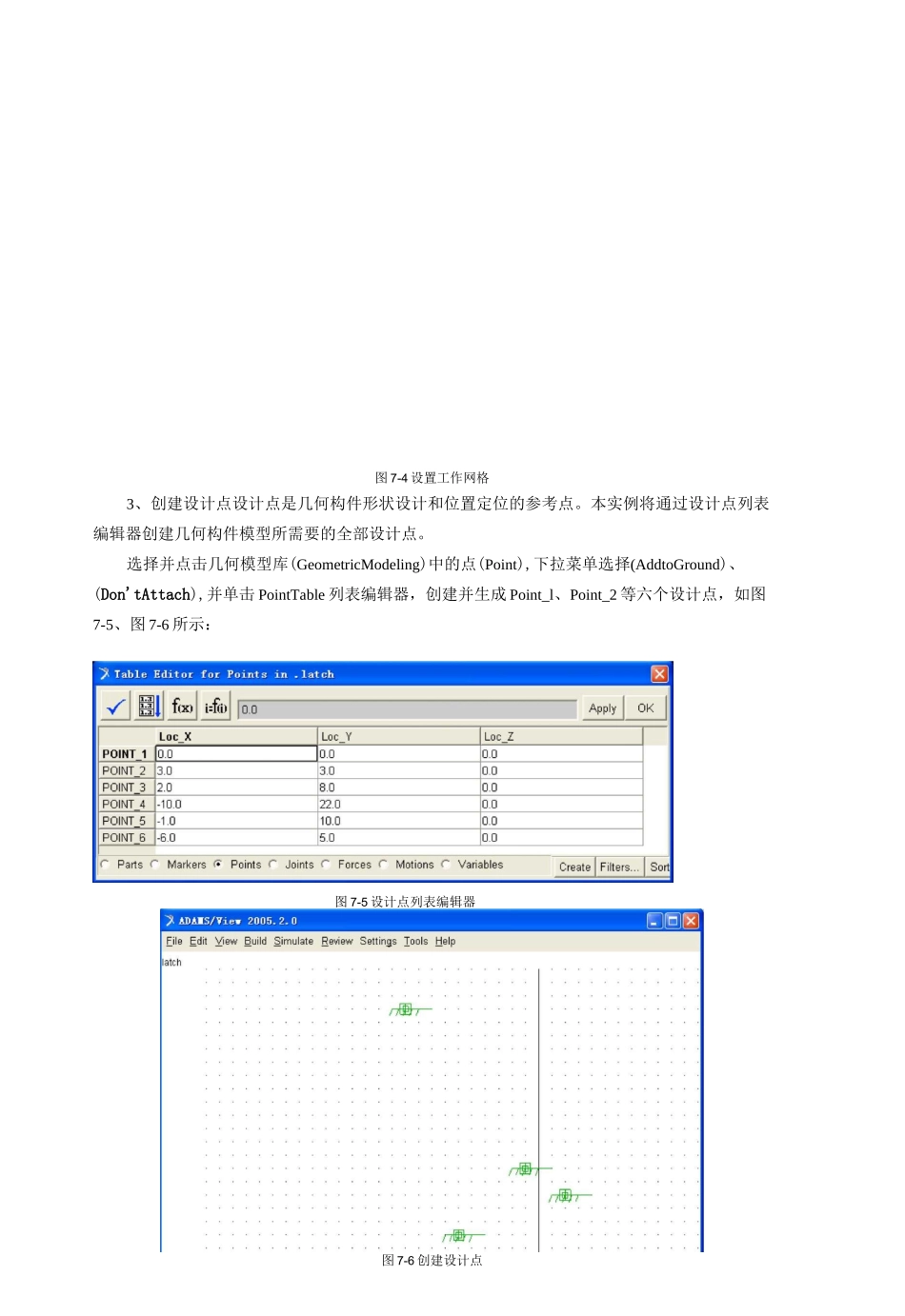
StartinC:\DocumentsandSettings\AdminJCreateanewmodelOpenanexistingdatabaseImportafilerExit2、设置工作环选择菜单栏图7-2创建新模型f【Units】命令,设置模型物理量单位,如图7-3所示:f【WorkingGrid]命令,设置工作网格,如图7-4所示:图7-3设置模型物理量单位图7-4设置工作网格3、创建设计点设计点是几何构件形状设计和位置定位的参考点
本实例将通过设计点列表编辑器创建几何构件模型所需要的全部设计点
选择并点击几何模型库(GeometricMo