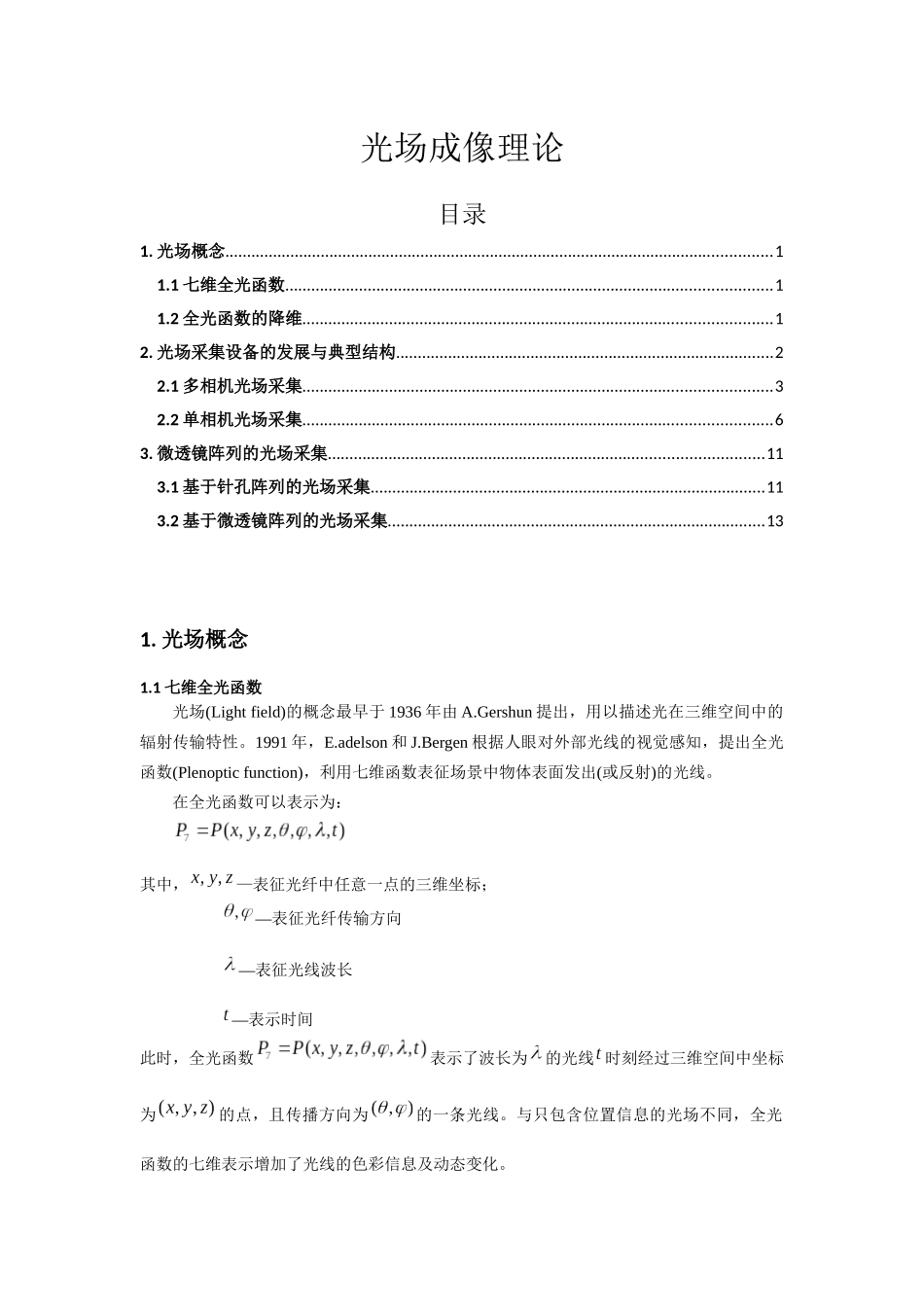
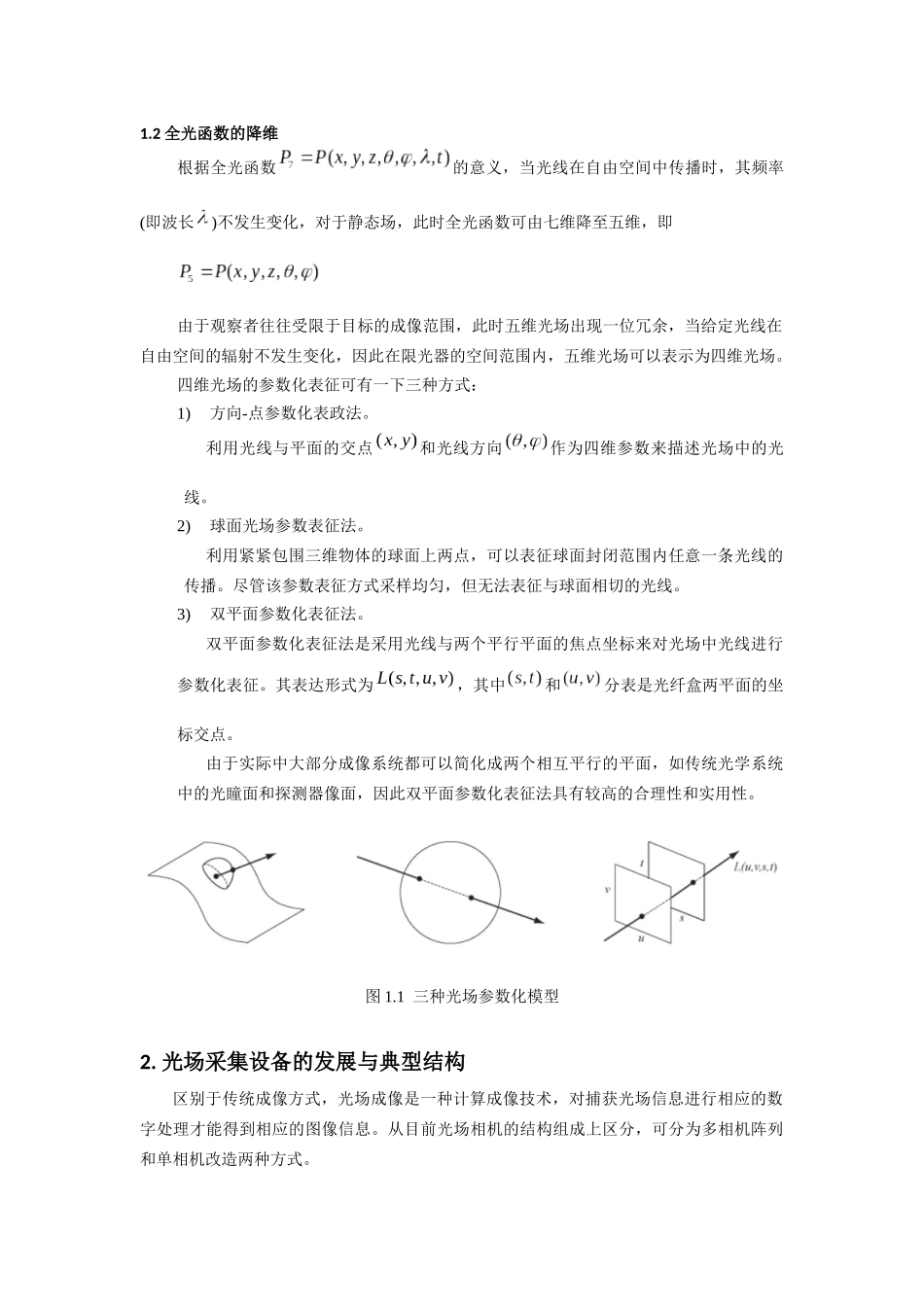
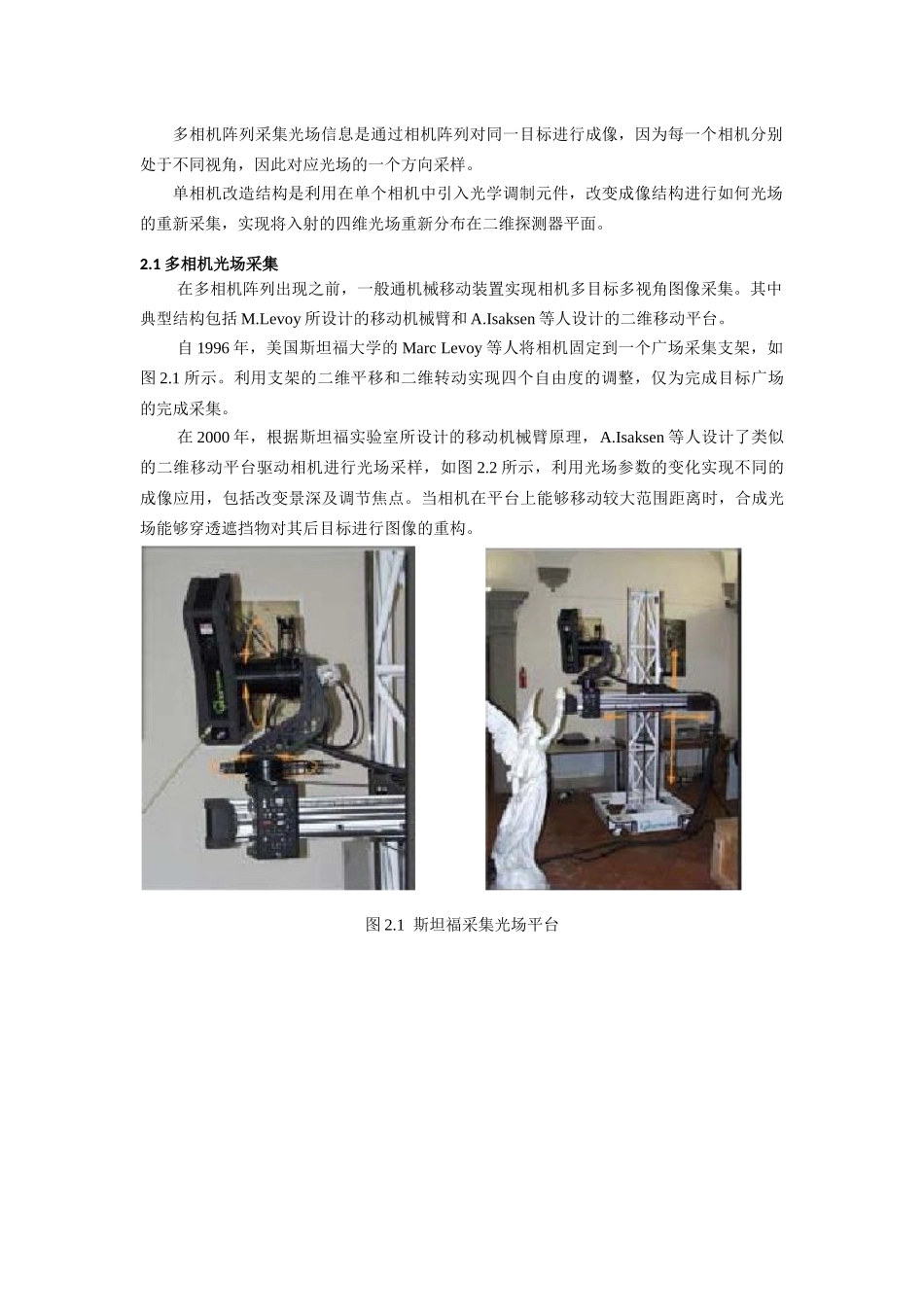
光场成像理论目录1.光场概念..............................................................................................................................11.1七维全光函数................................................................................................................11.2全光函数的降维............................................................................................................12.光场采集设备的发展与典型结构.......................................................................................22.1多相机光场采集............................................................................................................32.2单相机光场采集............................................................................................................63.微透镜阵列的光场采集....................................................................................................113.1基于针孔阵列的光场采集...........................................................................................113.2基于微透镜阵列的光场采集.......................................................................................131.光场概念1.1七维全光函数光场(Lightfield)的概念最早于1936年由A.Gershun提出,用以描述光在三维空间中的辐射传输特性。1991年,E.adelson和J.Bergen根据人眼对外部光线的视觉感知,提出全光函数(Plenopticfunction),利用七维函数表征场景中物体表面发出(或反射)的光线。在全光函数可以表示为:其中,—表征光纤中任意一点的三维坐标;—表征光纤传输方向—表征光线波长—表示时间此时,全光函数表示了波长为的光线时刻经过三维空间中坐标为的点,且传播方向为的一条光线。与只包含位置信息的光场不同,全光函数的七维表示增加了光线的色彩信息及动态变化。1.2全光函数的降维根据全光函数的意义,当光线在自由空间中传播时,其频率(即波长)不发生变化,对于静态场,此时全光函数可由七维降至五维,即由于观察者往往受限于目标的成像范围,此时五维光场出现一位冗余,当给定光线在自由空间的辐射不发生变化,因此在限光器的空间范围内,五维光场可以表示为四维光场。四维光场的参数化表征可有一下三种方式:1)方向-点参数化表政法。利用光线与平面的交点和光线方向作为四维参数来描述光场中的光线。2)球面光场参数表征法。利用紧紧包围三维物体的球面上两点,可以表征球面封闭范围内任意一条光线的传播。尽管该参数表征方式采样均匀,但无法表征与球面相切的光线。3)双平面参数化表征法。双平面参数化表征法是采用光线与两个平行平面的焦点坐标来对光场中光线进行参数化表征。其表达形式为,其中和分表是光纤盒两平面的坐标交点。由于实际中大部分成像系统都可以简化成两个相互平行的平面,如传统光学系统中的光瞳面和探测器像面,因此双平面参数化表征法具有较高的合理性和实用性。图1.1三种光场参数化模型2.光场采集设备的发展与典型结构区别于传统成像方式,光场成像是一种计算成像技术,对捕获光场信息进行相应的数字处理才能得到相应的图像信息。从目前光场相机的结构组成上区分,可分为多相机阵列和单相机改造两种方式。多相机阵列采集光场信息是通过相机阵列对同一目标进行成像,因为每一个相机分别处于不同视角,因此对应光场的一个方向采样。单相机改造结构是利用在单个相机中引入光学调制元件,改变成像结构进行如何光场的重新采集,实现将入射的四维光场重新分布在二维探测器平面。2.1多相机光场采集在多相机阵列出现之前,一般通机械移动装置实现相机多目标多视角图像采集。其中典型结构包括M.Levoy所设计的移动机械臂和A.Isaksen等人设计的二维移动平台。自1996年,美国斯坦福大学的MarcLevoy等人将相机固定到一个广场采集支架,如图2.1所示。利用支架的二维平移和二维转动实现四个自由度的调整,仅为完成目标广场的完成采集。在2000年,根据斯...