董凤鸿1,张皓2最优控制理论在汽车控制系统中运用董凤鸿1,张皓2(1北京科技大学2010级信计2班41040317)(2北京科技大学2012级信计2班41064044)摘要:随着人们生活水平的提高,汽车已经开始走进百姓的生活中
随着人们对汽车消费的增加,越来越多的人开始更多的关注的不仅仅是汽车本身,更多的开始关注汽车的安全性及舒适性
由此,各大汽车厂商更具消费者的需求开始着重研究带有主动控制能力的汽车控制系统
本文引入最优控制理论对当今比较流行的汽车悬挂系统、汽车防抱制动系统(简称ABS系统)和无级变速器控制系统进行优化
由此达到优化汽车安全性、经济性和舒适性
关键词:最优控制理论、悬挂系统、防抱制动系统、无级变速器控制系统一、引言汽车防抱制动系统(简称ABS系统),实质上是一种制动力的自动调节装置
这种装置使汽车制动系统的结构发生了质的变化,它不仅能充分发挥制动器的制动性能,提高制动减速度和缩短制动距离,而且能有效地提高汽车制动时的方向稳定性,大大改善汽车的行驶安全性
悬挂系统是指车身与车轴之间连接的所有组合体零件的总称,悬挂系统直接影响着汽车的安全性、稳定性和舒适性,是汽车的重要组成部分之一
目前,降低汽车能源消耗和减少废气排放已成为汽车行业最关注的问题,大量试验表明,装有无级变速器(CVT)的汽车比装有传统有级变速器的汽车在改善汽车燃油经济性和排放等方面具有更大的潜力,这是因为CVT连续变化的传动比可以使发动机转速独立于负载和车速的变化,最大限度地发挥发动机的经济性和动力性
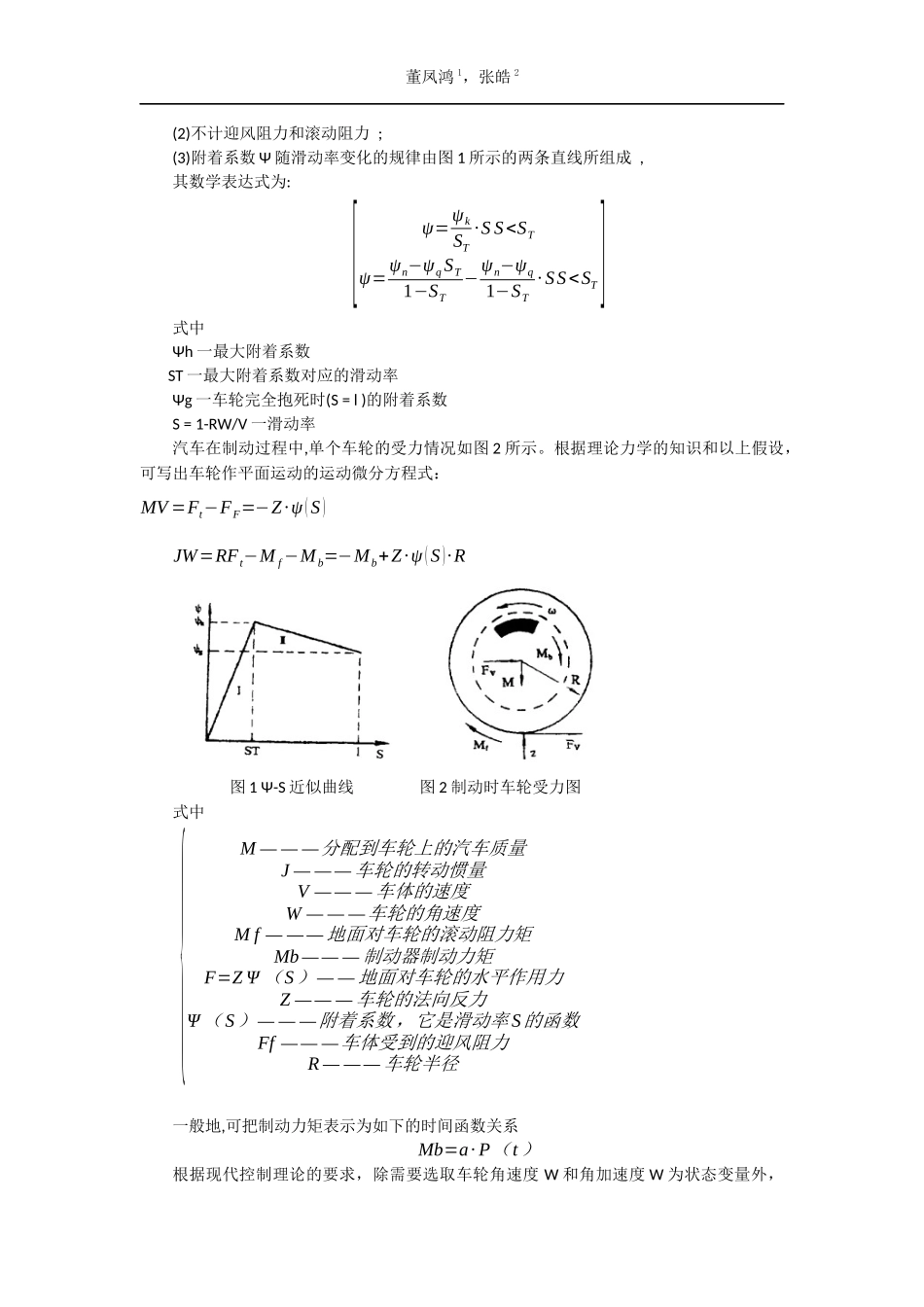
二、正文(一)、汽车防抱制动系统最优控制1、方法介绍最优控制是基于状态空间法的现代控制理论方法
它可以根据车辆一地面系统的数学模型,用状态空间的概念,在时间域内研究汽车防抱制动系统
是一种基于模型分析型的控制系统,它根据防抱系统的各项控制要求,按最优化原理求得控制系统的最优控制指标
我们知道:现代