一、相关概念伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统
伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统
它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便
在机器人中,伺服驱动器控制电机的运转
驱动器采用速度环,位置环,电流环三环闭环电路,内部还设有错误检出和保护电路
驱动器通过通信连接器,控制连接器,编码连接器跟外部输入信号和输出信号相连
通信连接器主要用于跟电脑或控制器通信
控制连接器用于跟伺服控制器联接,驱动器所需的输入信号、输出信号、控制信号和一些方式选择信号都通过该控制连接器传输,它是驱动器最为关键的连接器
编码连接器跟电机编码器连接,用于接收编码器闭环反馈信号,即速度反馈和换向信号
伺服电机主要用于驱动机器人的关节
关节越多,机器人的柔性和精准度越高,所需要使用的伺服电机的数量就越多
机器人对伺服电机的要求非常高,必须满足快速响应、高起动转矩、动转矩惯量比大、调速范围宽,要适应机器人的形体做到体积小、重量轻,还必须经受频繁的正反向和加减速运行等苛刻的条件,做到高可靠性和稳定性
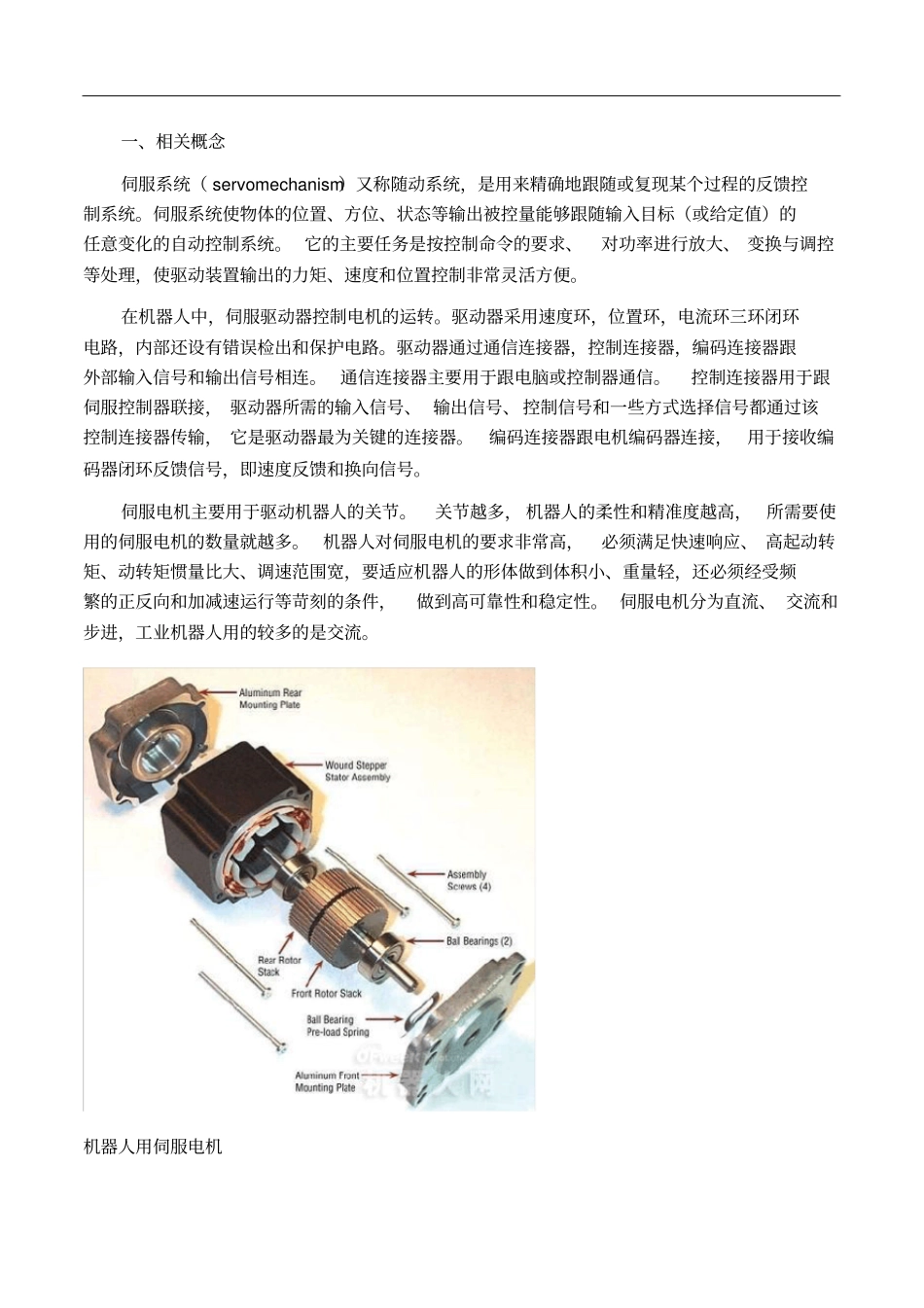
伺服电机分为直流、交流和步进,工业机器人用的较多的是交流
机器人用伺服电机二、伺服系统的技术现状2
1视觉伺服系统随着机器人技术的迅猛发展,机器人承担的任务更加复杂多样,传统的检测手段往往面临着检测范围的局限性和检测手段的单一性
视觉伺服控制利用视觉信息作为反馈,对环境进行非接触式的测量,具有更大的信息量,提高了机器人系统的灵活性和精确性,在机器人控制中具有不可替代的作用
视觉系统由图像获取和视觉处理两部分组成,图像的获取是利用相机模型将三维空间投影到二维图像空间的过程,而视觉处理则是利用获取的图像信息得到视觉反馈的过程