1第三节刚度矩阵——节点载荷与节点位移之间的关系一、单元刚度矩阵1
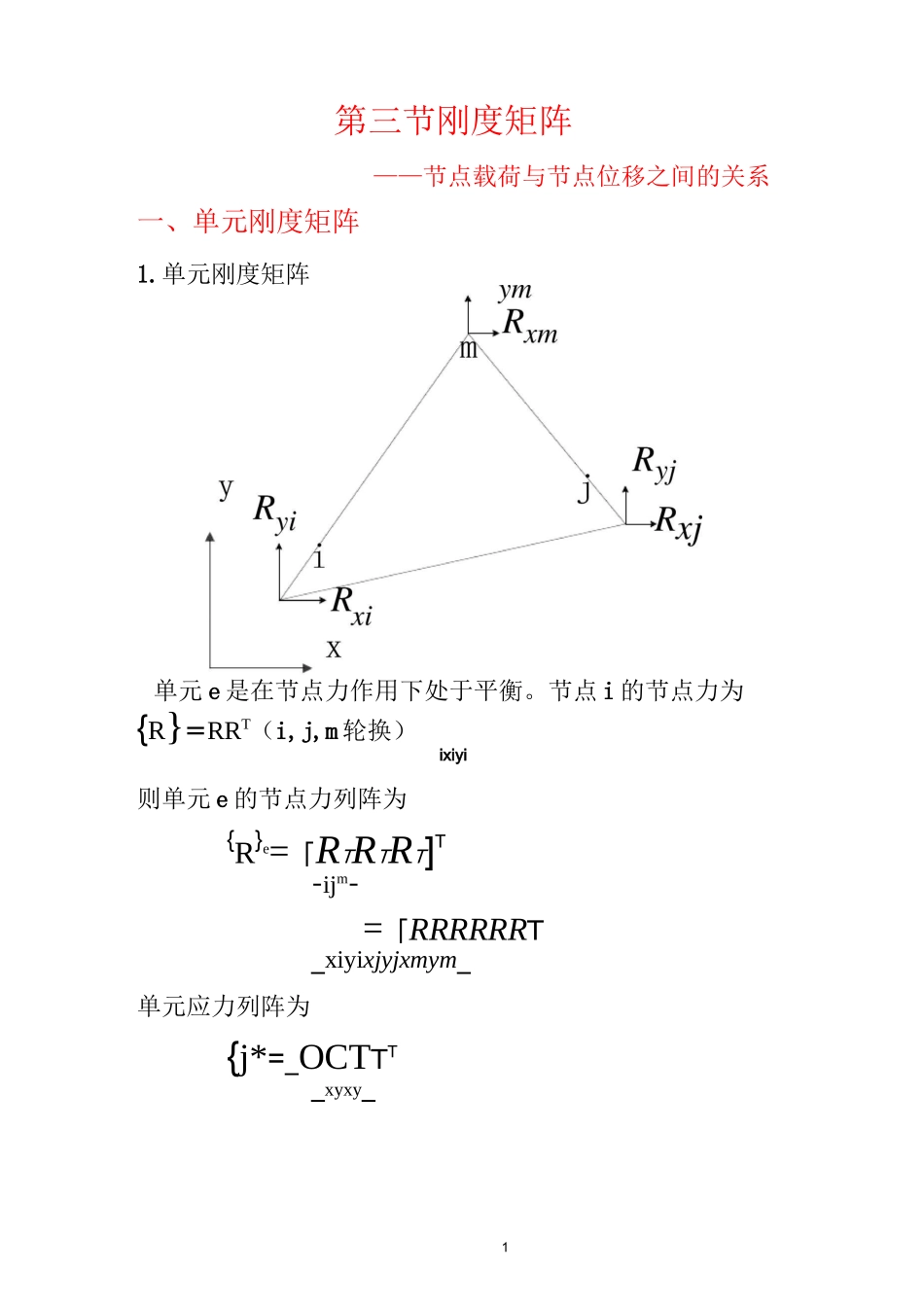
单元刚度矩阵单元 e 是在节点力作用下处于平衡
节点 i 的节点力为{R}=RRT(i,j,m 轮换)ixiyi则单元 e 的节点力列阵为{R}e=「RTRTRT]T-ijm-=「RRRRRRT_xiyixjyjxmym_单元应力列阵为{j*=_OCTTT_xyxy_{*}丫{R}*}YJJ[B}tdxdyu*iv*u*v*u*v*jjmm单元虚应变列阵为{2「y*x2假定弹性体的所有节点都产生一虚位移,单元 e 的三个参照式(3-7),则单元虚应变为{*}=[B]{*}作用在弹性体上的外力在虚位移上所做的功为〈*}丁{R}单元内的应力在虚应变上所做的功为:JJ]{*}Y£}tdxdyA根据虚位移原理,可得单元的虚功方程叫*}丫{R}=・・({*}丫{C>}tdxdyI 丿节故将式(3-1T[D][B]{s}tdxdy[D][B]tdxdy{5}3-27)3-29)k-e=JJ「3-28)3{R*=JJ[B]T{5}tdxdyA简记为「k]e£}=衣}上式表征单元节点力与节点位移之间的关系,称为单元刚度方程(单元平衡方程)其中[k]e称之为单元刚度矩阵(简称为单刚),是 6x6 矩阵
如果单元的材料是均质的,矩阵[D]中的元素也是常量,且在三角形常应变的情况下,矩阵[B]中的元素也是常数,当单元的厚度也是常数时,注意到dxdy=A,于6xk♦♦iik♦♦jikmik♦♦ijkimkjmkmr]其中任一子块 krs(r,s=i,j,m)3-31)是一个 2X2 子矩阵,LkLB][D](B〕At(r,s=i,j,m)-k]=「B[仃 D]「B]At-rs」「r」「」Ls」s1—卩bb+ccrs—2—rs71—卩 7|LXcb+be|Lxbe+1“ebrs—2—rs1—卩77ee+bb(r,s=i,j,m)3-