摘要随着汽车工业的迅速发展,关于汽车方面的研究也越来越受人关注,全国电子大赛和省内电子大赛几乎每次都有这方面的题目,可见国内很重视该题目的研究
特别是在智能控制方面,小车进行寻迹以及避障和计里程,在工厂里的智能控制方面非常重要
选择程控小车这一题目,跟随科技发展趋势,同时可以学到许多关于电学和机械结构等方面的基础知识,这对于我们将来工作提供了十分宝贵的经验
我们主要研究如何让小车走直线,并在此基础上,如何实现里程记录的功能
主要以自主设计的底盘为基础,以直流减速电机及其控制电路为驱动,以STC89C52 单片机为控制核心,组成的智能小车在特定的程序下实现走直线的功能;基于阿克曼原理设计的平面等腰梯形连杆机构能够实现小车的完美转向;基于52 单片机,光耦,L298,78L05 的控制电路能够实现对直流减速电机与舵机的整体控制;最后利用旋转编码器通过器输出方波的个数算出小车行驶的路程,从而实现以上功能
通过多次的编程修改和调试最终实现了程控小车里程记录的功能
关键词52 单片机智能小车转向机构阿克曼原理旋转编码器方波计数引言可记录里程的智能小车是集机械、电子、计算机与自动控制于一体的先进机电设备,它很好的把机与电有机的结合到一起
智能小车属于机器人系列,它在无人驾驶机动车、无人工厂、智能仓库、服务机器人等领域有着比较广泛的前景,可见其研究意义的重要性
我们主要实现启动智能小车,并能记录其行驶里程
主要的工作内容有以下几点:首先确定小车的基本外形和构造,利用不同的板料和轴类料经过设计和加工实现小车的整体结构;其后在小车上安装基于AT89C52 单片机的控制芯片,利用芯片程序使电机驱动小车配合舵机程序完成规定的行走路线;在此基础之上,使用旋转编码器实现小车行驶里程记录的功能
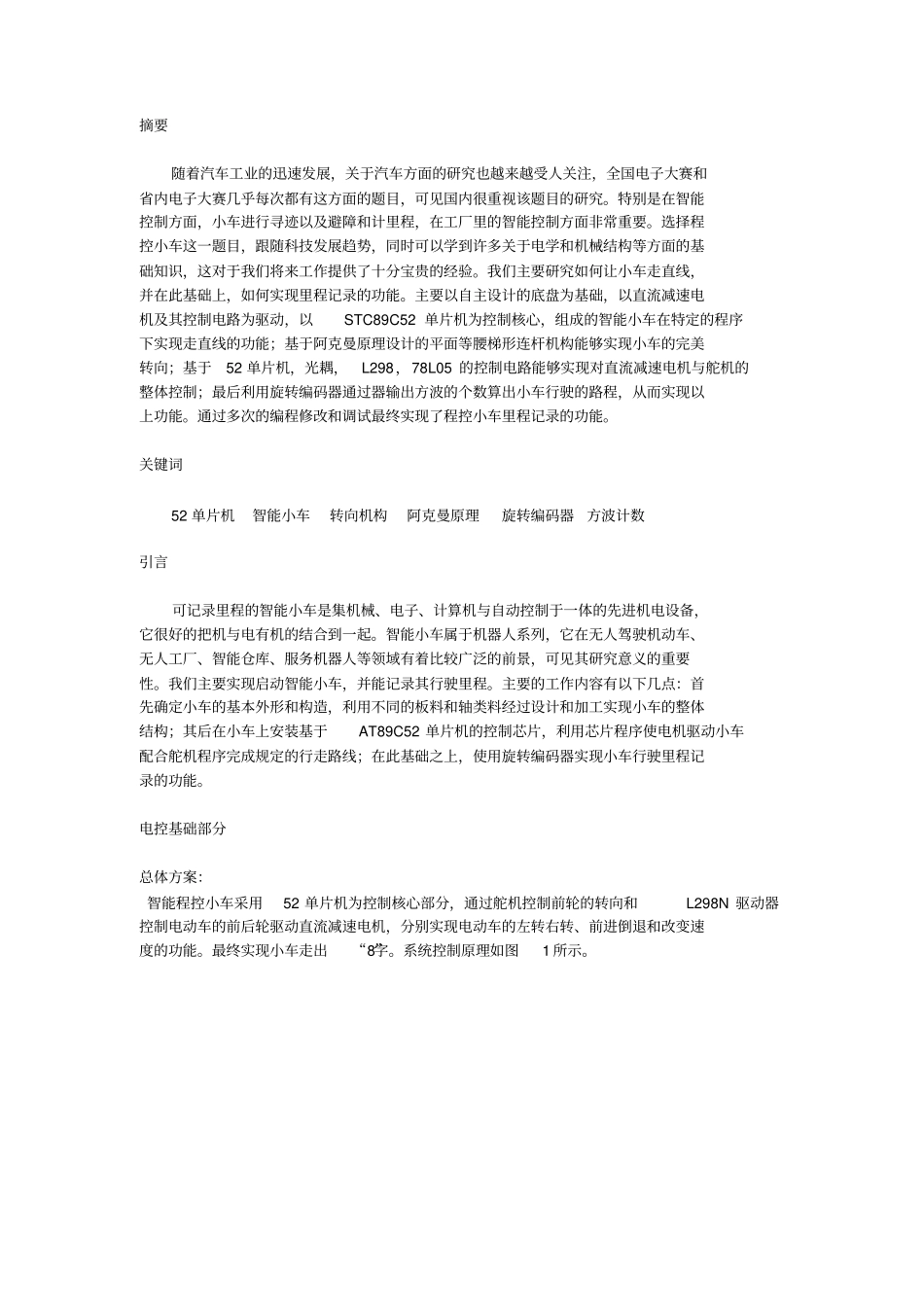
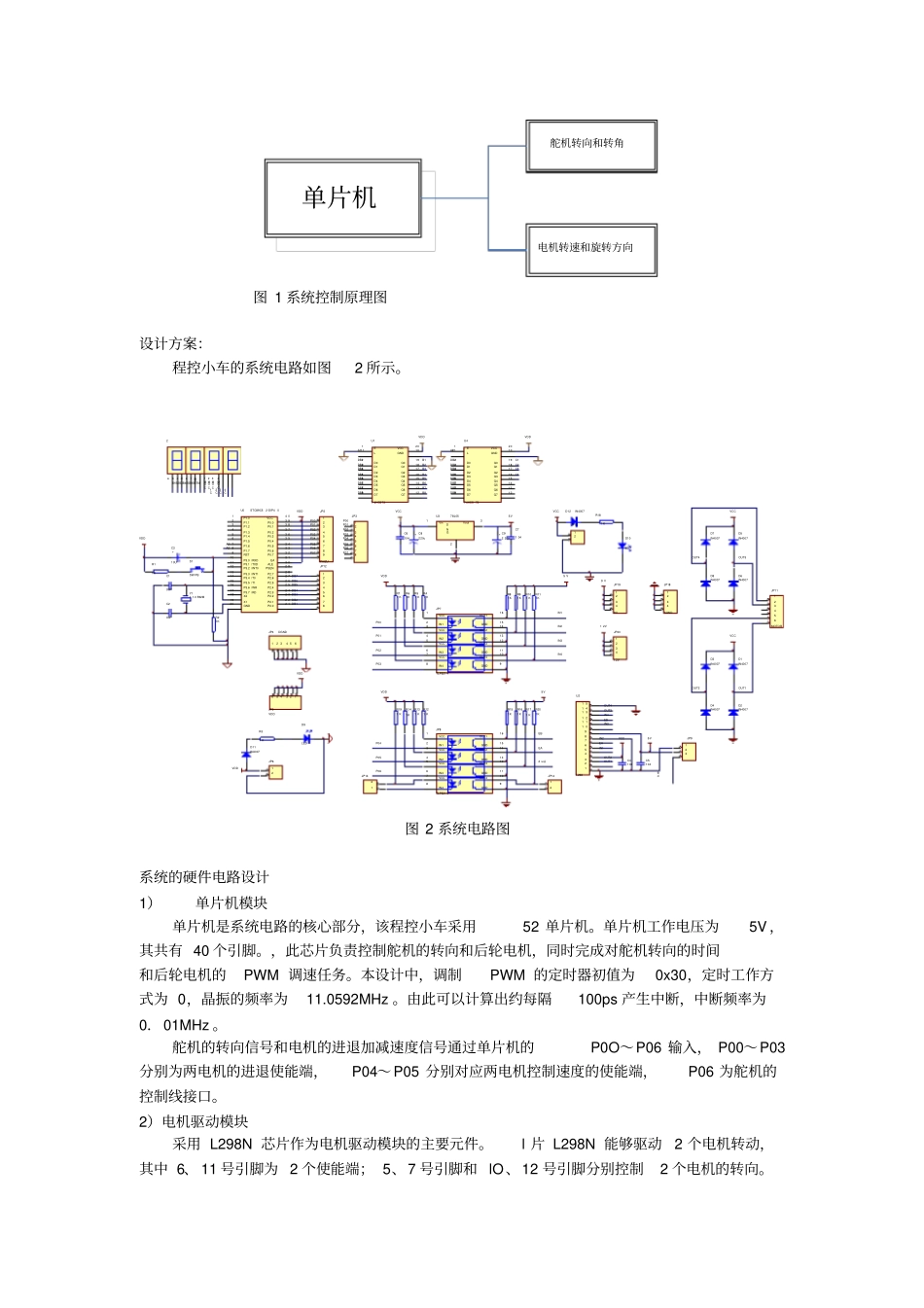
电控基础部分总体方案:智能程控小车采用52 单片机为控制核心部分,通过舵机控制前轮的转向和L298N 驱动器