1 / 5 自动控制原理大作业要求与题目(1)人工设计利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出校正装置的传递函数
验算校正后系统是否满足性能指标要求
(2)计算机辅助设计利用 MATLAB 语言对系统进行辅助设计、仿真和调试
(3)确定校正装置的电路形式及其参数
(4)撰写设计报告
具体内容包括如下五个部分
1)设计任务书2)设计过程 人工设计过程包括计算数据、 系统校正前后及校正装置的Bode图(在半对数坐标纸上)、校正装置传递函数、性能指标验算数据
计算机辅助设计过程包括 Simulink仿真框图、 Bode图、阶跃响应曲线、性能指标要求的其他曲线
3)校正装置电路图4)设计结论5)设计后的心得体会1
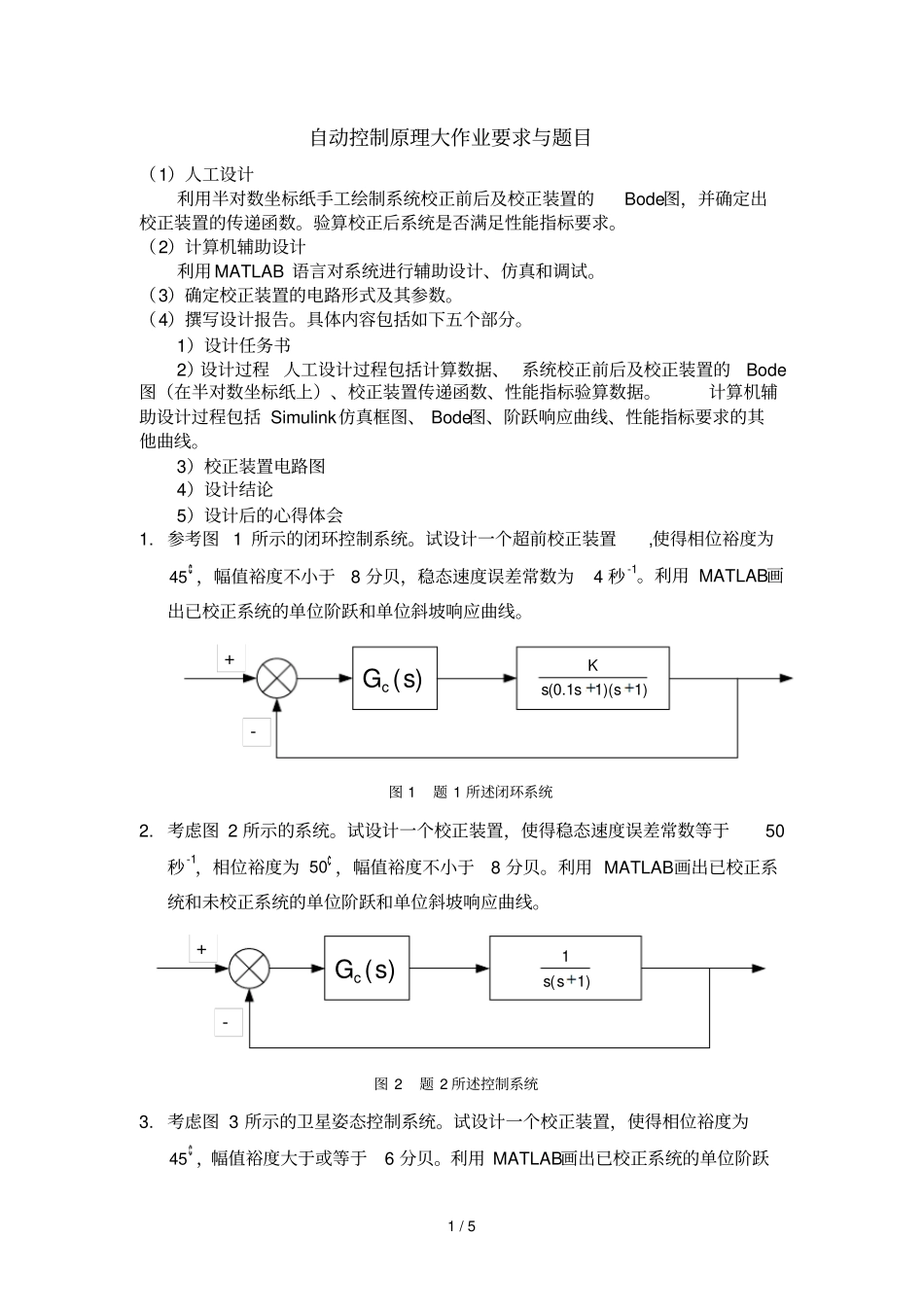
参考图 1 所示的闭环控制系统
试设计一个超前校正装置,使得相位裕度为45 ,幅值裕度不小于8 分贝,稳态速度误差常数为4 秒-1
利用 MATLAB画出已校正系统的单位阶跃和单位斜坡响应曲线
+-( )cGs(0
11)(1)Ksss图 1 题 1 所述闭环系统2
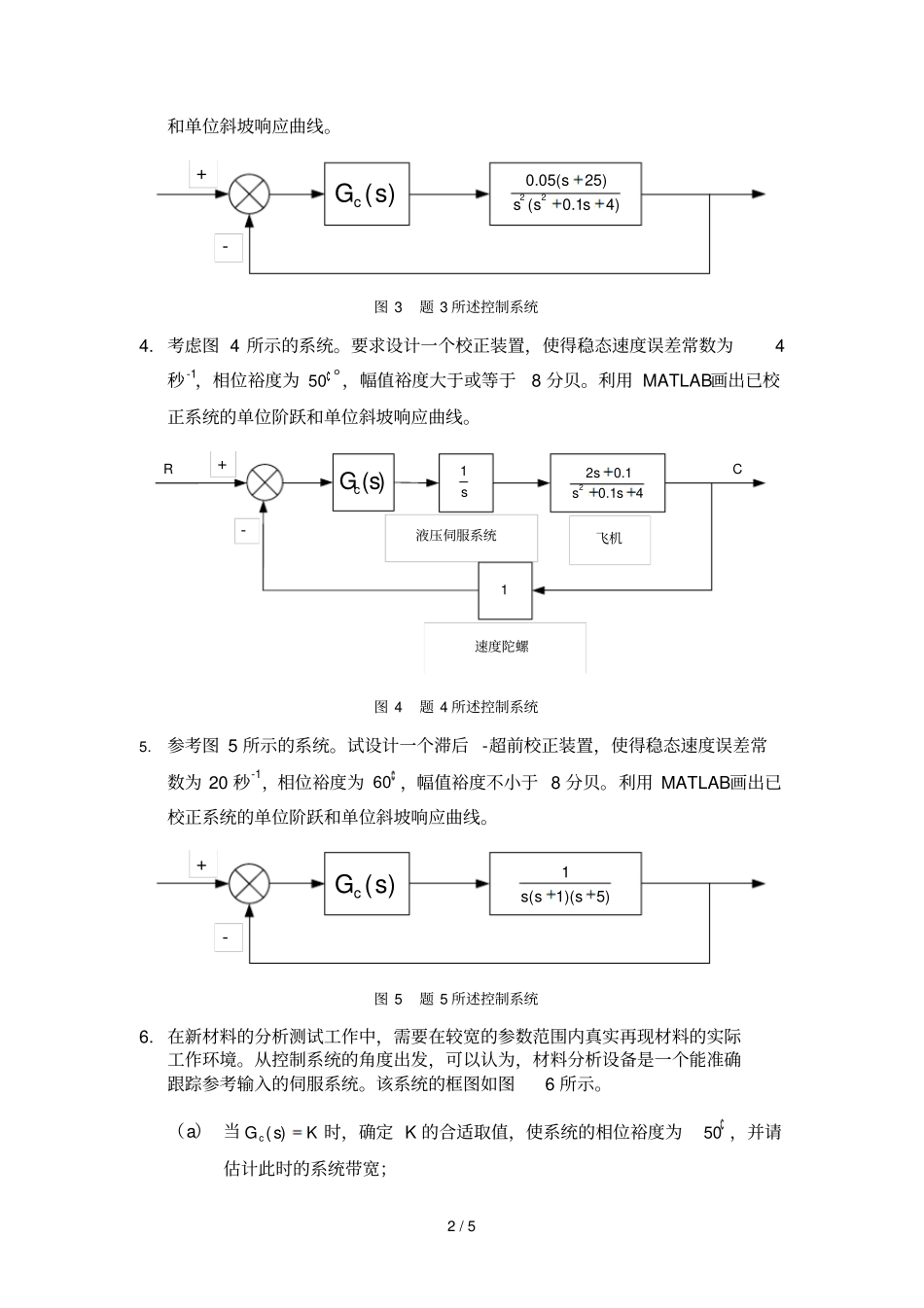
考虑图 2 所示的系统
试设计一个校正装置,使得稳态速度误差常数等于50秒-1,相位裕度为 50 ,幅值裕度不小于8 分贝
利用 MATLAB画出已校正系统和未校正系统的单位阶跃和单位斜坡响应曲线
+-( )cGs1(1)s s图 2 题 2 所述控制系统3
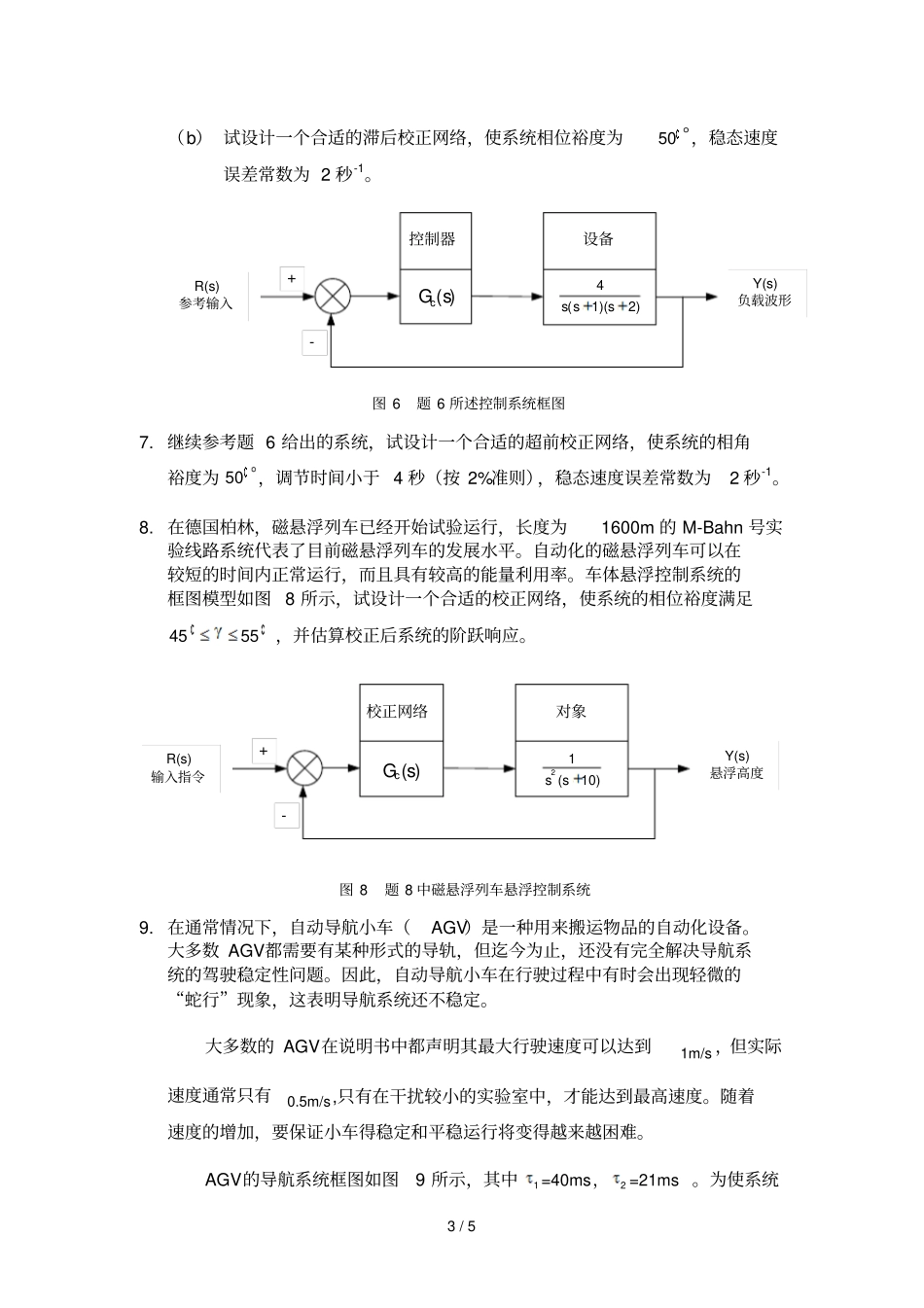
考虑图 3 所示的卫星姿态控制系统
试设计一个校正装置,使得相位裕度为45 ,幅值裕度大于或等于6 分贝
利用 MATLAB画出已校正系统的单位阶跃2 / 5 和单位斜坡响应曲线
+-( )cGs220
05(25)(0
14)ssss图 3 题 3 所述控制系统4
考虑图 4 所示的系统
要求设计一个校正装置,使得稳态速度误差常数为4秒 -1,相位裕度为 50,幅值裕度大于或等于8 分贝
利用 MATLAB画出已校正