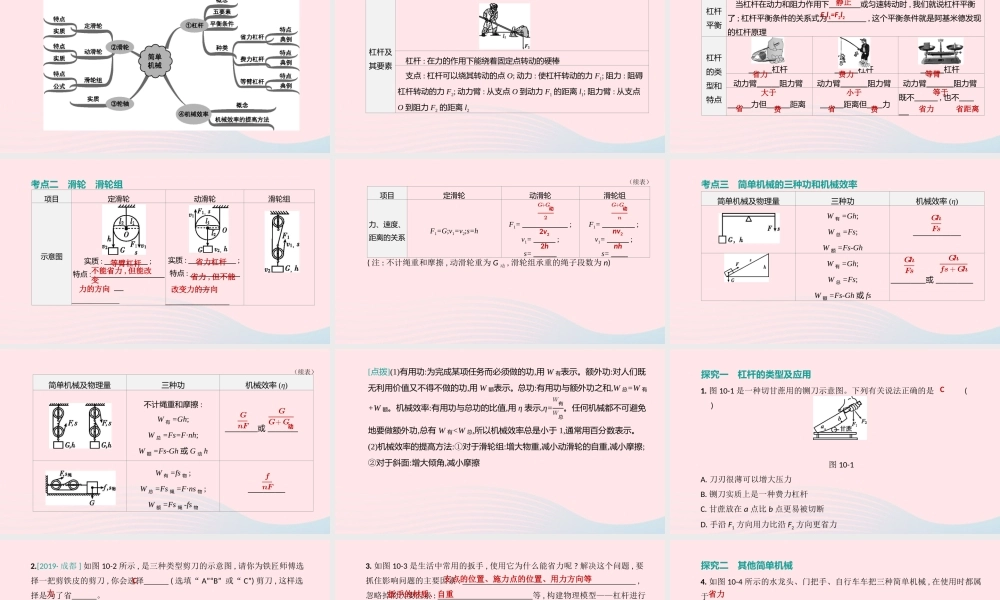
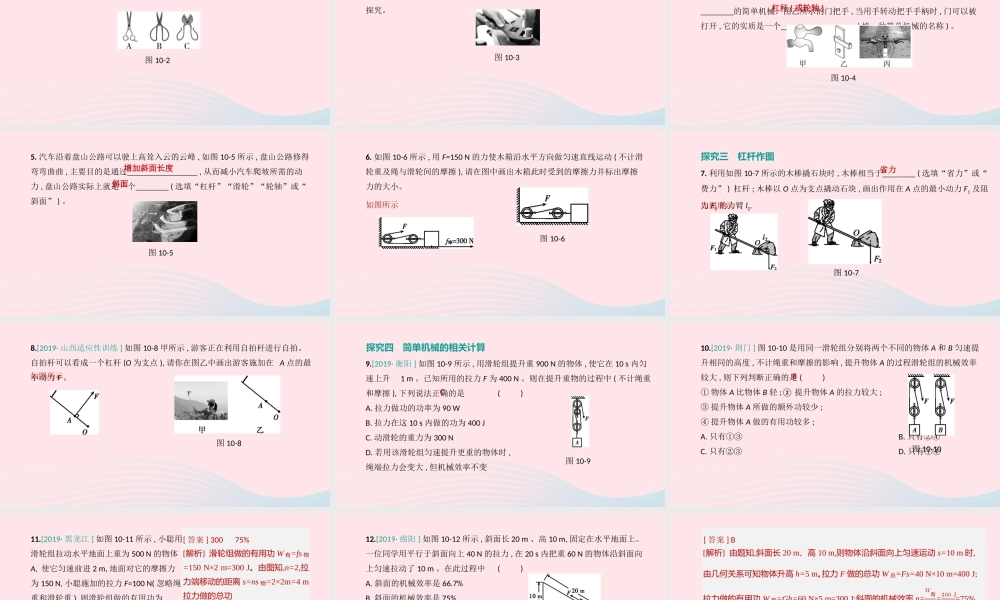
第 10 课时 简单机械 机械效率思维导图 构建体系杠杆及其要素 杠杆 : 在力的作用下能绕着固定点转动的硬棒 支点 : 杠杆可以绕其转动的点 O; 动力 : 使杠杆转动的力 F1; 阻力 : 阻碍杠杆转动的力 F2; 动力臂 : 从支点 O 到动力 F1 的距离 l1; 阻力臂 : 从支点O 到阻力 F2 的距离 l2考点一 杠杆杠杆平衡 当杠杆在动力和阻力作用下 或匀速转动时 , 我们就说杠杆平衡了 ; 杠杆平衡条件的关系式为 , 这个平衡条件就是阿基米德发现的杠杆原理 杠杆的类型和特点 杠杆 杠杆 杠杆 动力臂 阻力臂 动力臂 阻力臂 动力臂 阻力臂 力但 距离 距离但 力 既不 , 也不 (续表)静止F1l1=F2l2省力费力等臂大于小于等于省费省费省力省距离项目定滑轮动滑轮滑轮组示意图实质 : ; 特点 : _____________实质 : ; 特点 : ______________考点二 滑轮 滑轮组等臂杠杆不能省力 , 但能改变力的方向省力杠杆省力 , 但不能改变力的方向(续表)项目定滑轮动滑轮滑轮组力、速度、距离的关系F1=G;v1=v2;s=hF1= ; v1= ; s= F1= ; v1= ; s= 𝑮+𝑮动𝟐 𝑮+𝑮动𝒏 ( 注 : 不计绳重和摩擦 , 动滑轮重为 G 动 , 滑轮组承重的绳子段数为 n)2v22hnv2nh考点三 简单机械的三种功和机械效率简单机械及物理量三种功机械效率 (η)W 有 =Gh;W 总 =Fs;W 额 =Fs-Gh W 有 =Gh;W 总 =Fs;W 额 =Fs-Gh 或 fs 或 𝑮𝒉𝑭𝒔 𝑮𝒉𝑭𝒔 𝑮𝒉𝒇𝒔 + 𝑮𝒉 (续表)简单机械及物理量三种功机械效率 (η)不计绳重和摩擦 :W 有 =Gh;W 总 =Fs=F·nh;W 额 =Fs-Gh 或 G 动 h 或 W 有 =fs 物 ;W 总 =Fs 绳 =F·ns