第十二章 简单机械知识点一 杠杆1
概念 : 一根硬棒 , 在力的作用下能绕着固定点转动 , 这根硬棒就是杠杆
说明 “硬棒”是指杠杆在转动中 , 形变很小 , 可忽略
杠杆的外形可以是任意形状 , 可以是直的 , 也可以是弯的
“支点”可在棒的一端 , 也可在棒上其他位置
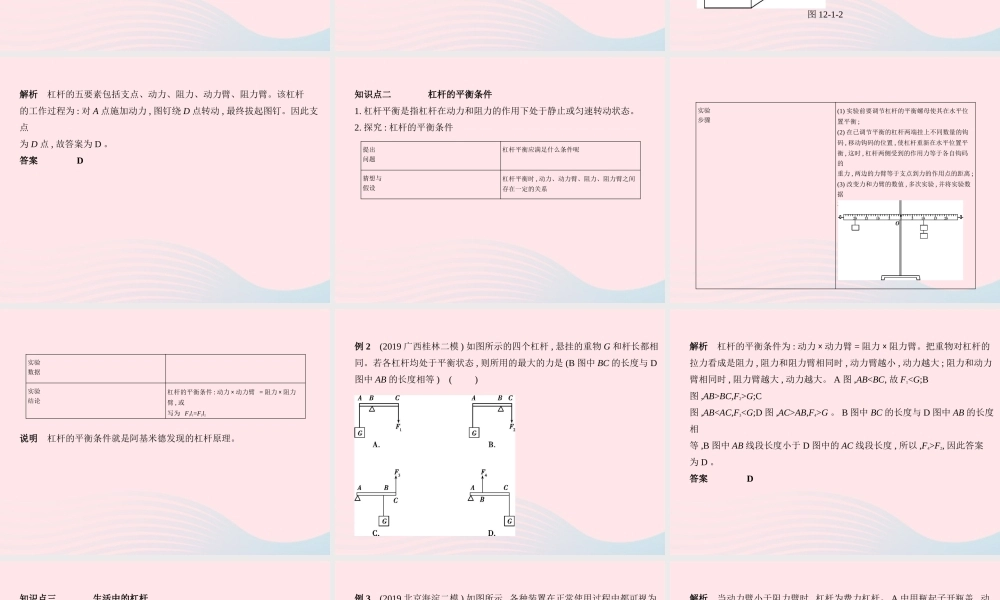
杠杆的五要素如图 12-1-1 所示
图 12-1-1 说明 ①动力和阻力并不一定分布在支点的两边 , 也可在支点的同一边 ;② 动力和阻力使杠杆转动的方向一定是相反的 , 但二者的方向不一定相反 ;③ 动力和阻力作用点都在杠杆上 ;④ 力臂是支点到力的作用线的距离 , 而不是到力的作用点的距离
例 1 (2019 陕西西安长安一模 ) 如图 12-1-2 所示 , 这款图钉来自一个初中生的创意 , 翘起部分为我们预留下施力空间
当拔起图钉时 , 将图钉看做杠杆 , 其支点为 ( )A
D 点 图 12-1-2解析 杠杆的五要素包括支点、动力、阻力、动力臂、阻力臂
该杠杆的工作过程为 : 对 A 点施加动力 , 图钉绕 D 点转动 , 最终拔起图钉
因此支点为 D 点 , 故答案为 D
答案 D知识点二 杠杆的平衡条件1
杠杆平衡是指杠杆在动力和阻力的作用下处于静止或匀速转动状态
探究 : 杠杆的平衡条件提出问题 杠杆平衡应满足什么条件呢猜想与假设杠杆平衡时 , 动力、动力臂、阻力、阻力臂之间存在一定的关系实验步骤(1) 实验前要调节杠杆的平衡螺母使其在水平位置平衡 ;(2) 在已调节平衡的杠杆两端挂上不同数量的钩码 , 移动钩码的位置 , 使杠杆重新在水平位置平衡 , 这时 , 杠杆两侧受到的作用力等于各自钩码的重力 , 两边的力臂等于支点到力的作用点的距离 ;(3) 改变力和力臂的数值 , 多次实验 , 并将实验数据填入表格 实验数据 实验结