路径检测软件控制驱动电机控制小车电磁感应智能电动车设计报告姓名:张峰 学号:2008111116 专业:电子信息工程 学院:电气与新能源学院摘要:为了实现小汽车智能控制,以 ATmega16 为核心,MCU 将各种传感器得到的信息进行综合判别和处理,然后发出指令给电机驱动器,控制小汽车,使小汽车能够快速、准确的实现左转、右转、调速、前进、后退和停车
设计使用了线圈磁场传感器进行路径检测,测量车辆的位置,矫正行车路线
用干簧管检测起始线处的永磁铁使小车能精确的在其附近停车
用 PWM 调速法准确的实现左转、右转、调速、前进和后退
多传感器并行工作,MCU 的综合数据处理为小车按照预定程序运行提供了充分的保证
关键字:ATmega16;线圈磁场传感器;干簧管;PWM 调速法1 小车系统整体设计电磁感应智能电动车采用 ATMEL 公司的高性能、低功耗的 8 位 AVR 微处理器作为主控制芯片
利用一个线圈磁场传感器检测路径,实现行车位置的判断,进而控制电机
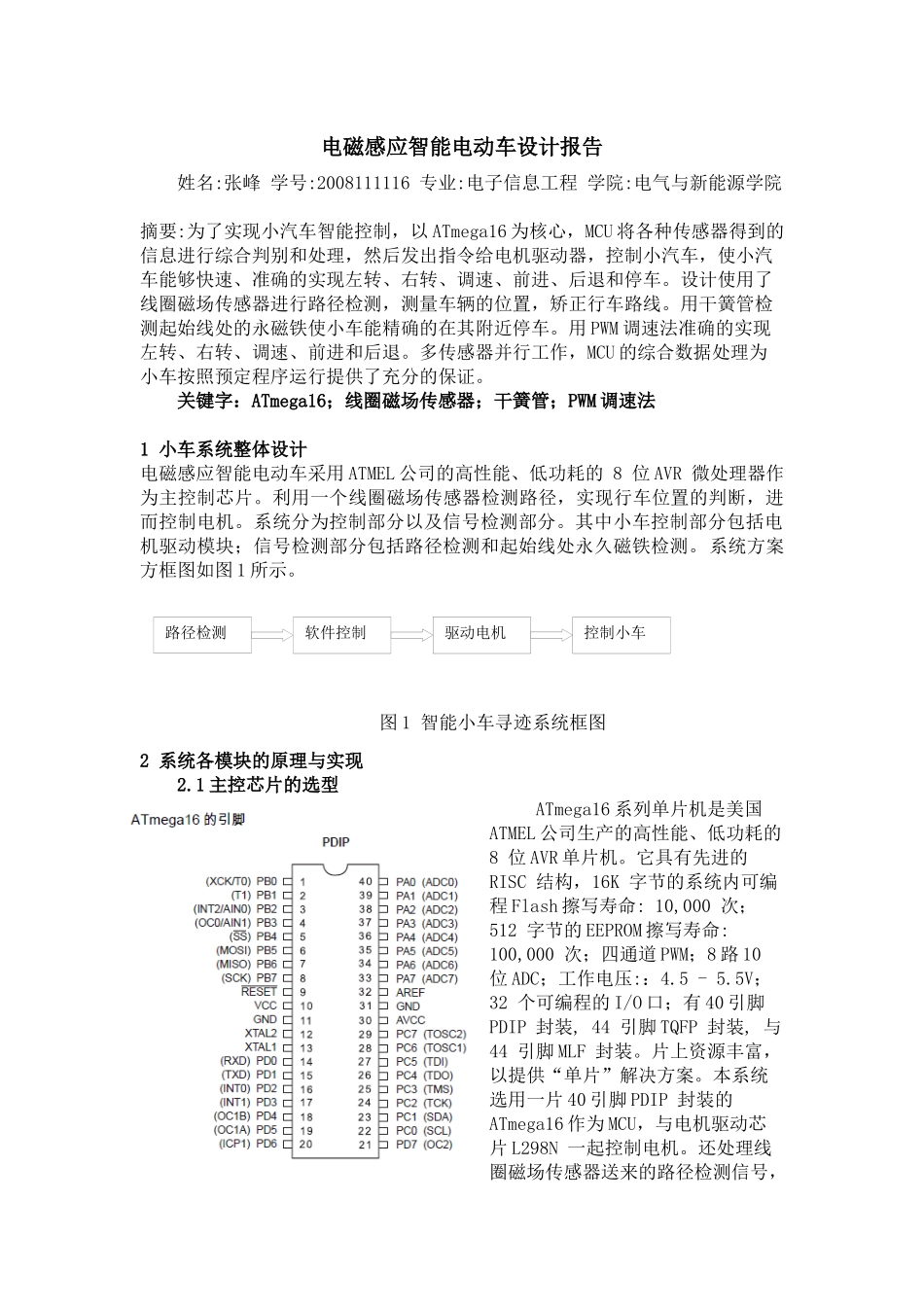
系统分为控制部分以及信号检测部分
其中小车控制部分包括电机驱动模块;信号检测部分包括路径检测和起始线处永久磁铁检测
系统方案方框图如图 1 所示
图 1 智能小车寻迹系统框图2 系统各模块的原理与实现2
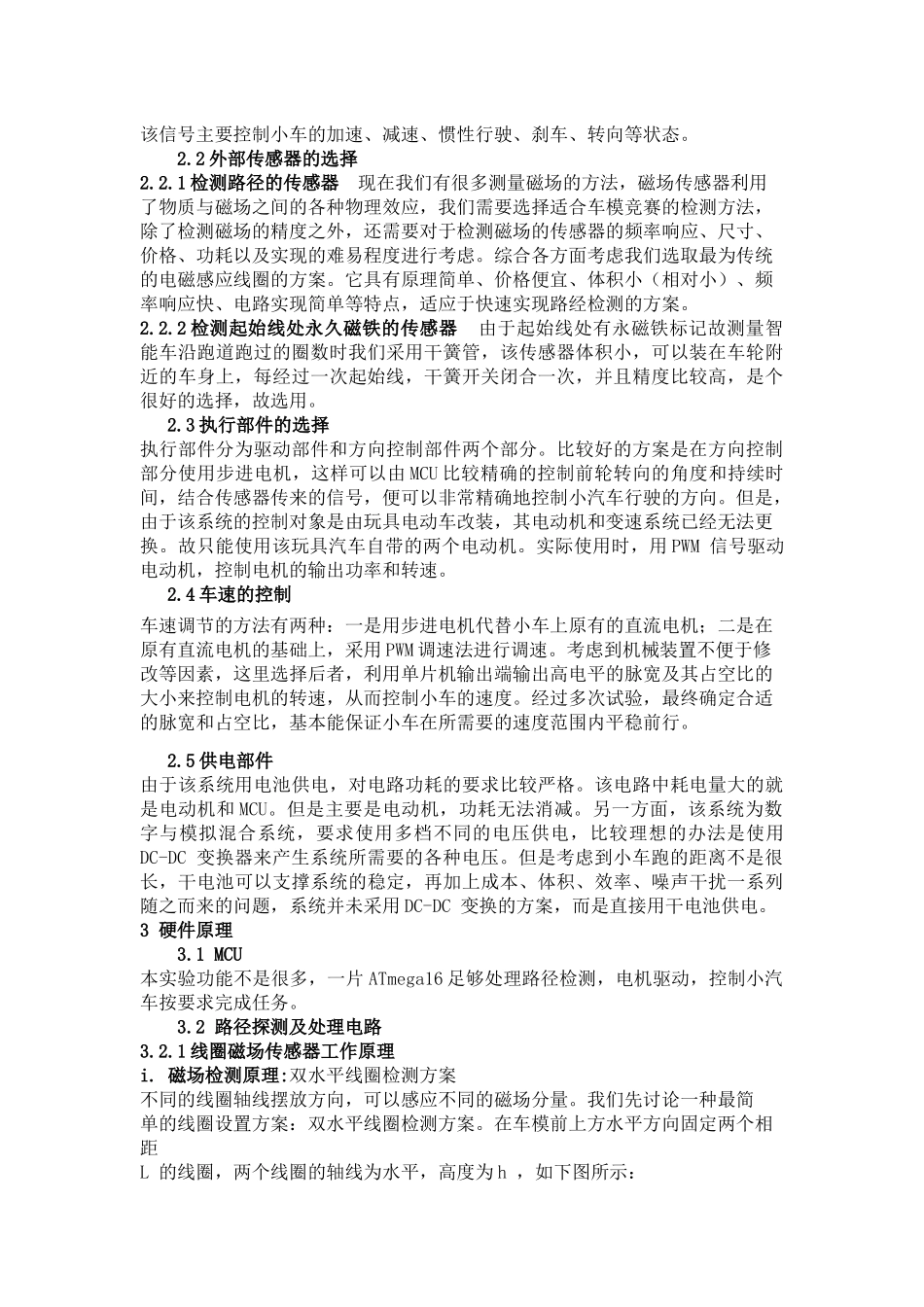
1 主控芯片的选型ATmega16 系列单片机是美国ATMEL 公司生产的高性能、低功耗的 8 位 AVR 单片机
它具有先进的RISC 结构,16K 字节的系统内可编程 Flash 擦写寿命: 10,000 次;512 字节的 EEPROM 擦写寿命: 100,000 次;四通道 PWM;8 路 10 位 ADC;工作电压::4
5V;32 个可编程的 I/O 口;有 40 引脚PDIP 封装, 44 引脚 TQFP 封装, 与44 引脚 MLF 封装
片上资源丰富,以提供“单片”解决方案
本系统选用一片 40