控制系统仿真课程设计题目控制系统仿真课程设计学院专业班级学号学生姓名指导教师完成日期控制系统仿真课程设计一、题目基于 Kalman 滤波地信息融合算法设计1) 学习并掌握线性系统Kalman 滤波地基本原理和基本公式;2) 学习并掌握一种常用地融合算法;3) 学习并利用Matlab 软件实现基本地Kalman 滤波和信息融合算法地仿真
二、主要要求1) 具备基本地概率与数理统计知识;2) 熟悉并掌握基本地Matlab 软件编写能力;3) 学习并掌握正交投影定理和矩阵求逆定理;4) 了解 Kalman 滤波地功能、来源和基本原理;5) 掌握 Kalman 滤波地推导过程和基本运行公式;6) 了解信息融合地基本概念和方法;7) 掌握一种典型地多传感器信息融合算法:分布式局部估计值加权融合
三、主要内容一)线性系统地Kalman 滤波考虑如下一类单传感器线性动态估计系统)1,()1()1,()(kkkkkkwxΦx (1))()()()(kkkkvxHz (2)其中,0k是离散地时间变量;1)1(nRkx是系统地状态向量,nnRkk)1,(Φ是系统地状态转移矩阵;1)(pRkz是状态)(kx地观测向量,npRk)(H是相应地观测矩阵;)1,(kkw和)(kv是零均值地高斯白噪声过程,且满足如下条件:0)()1,()()()(0)()1,()1,()1,(0)1,(,,TjkTjkTjkkEkjkEkEkkjjkkEkkEvwRvvvQwww,0, jk (3)初始状态)0(x为一随机向量,且满足0000
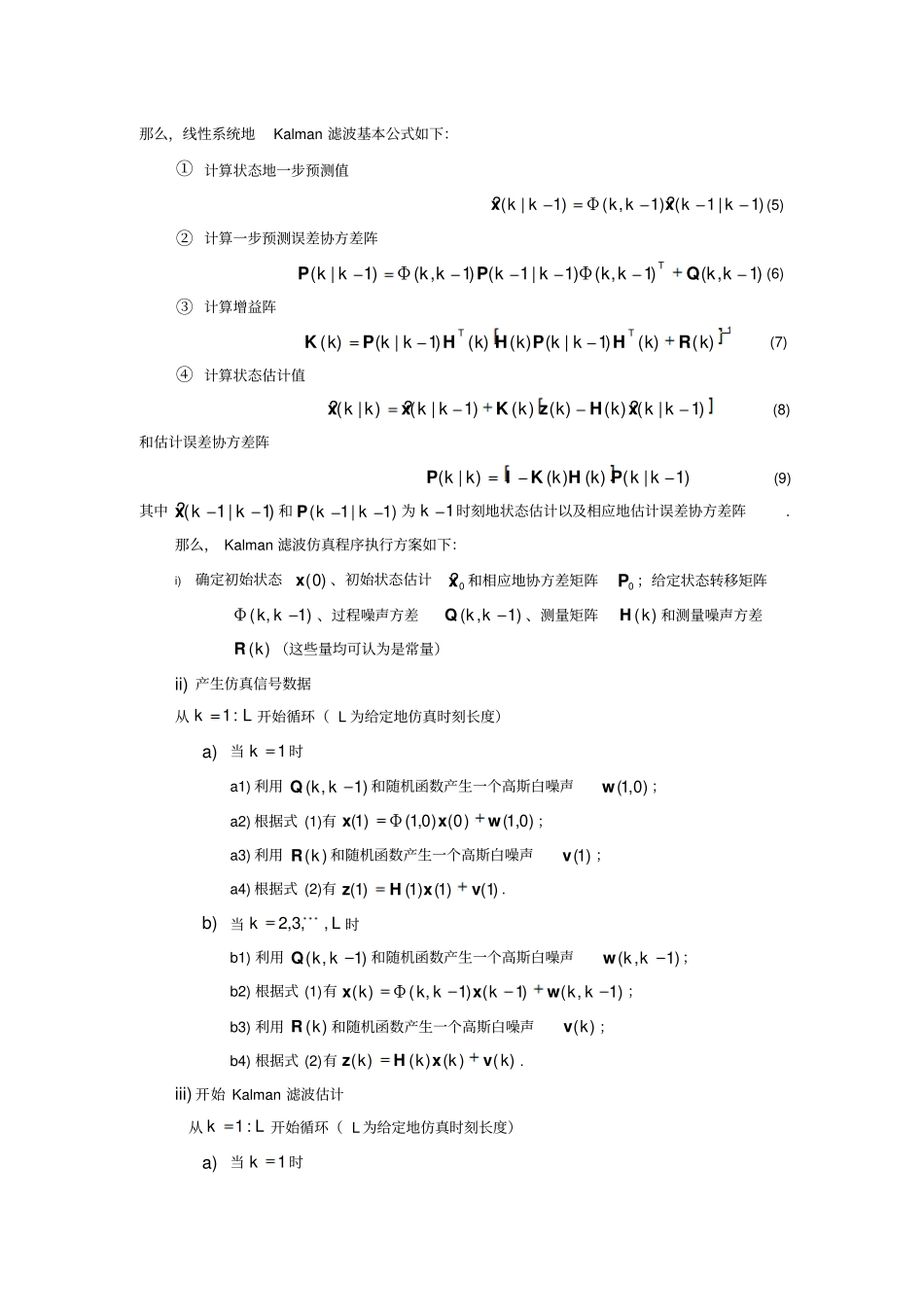
)0(PxxxxxxTEE (4)那么,线性系统地Kalman 滤波基本公式如下:① 计算状态地一步预测值)1|1(
)1,()1|(
kkkkkkxΦx(5)② 计算一步预测误差协方差阵)1,()1,()1|1()1,()1|(kkkkkkkkkkTQΦPΦP(