PID 控制原理与参数整定方法 一 、概述 PID 是 比 例 -积 分 -微 分 控 制 的 简 称 , 也 是 一 种 控 制 算 法 , 其 特 点 是 结 构 改 变灵 活 、技术成熟、适应性强
对一 个控 制 系统而言, 由于控 制 对象的 精确数学模型难以建立, 系统的 参数经常发生变 化, 运用控 制 理论综合分 析要耗费很大的 代价, 却不能得到预期的 效果, 所以人们往往采用 PID 调节器, 根据经验在线整定参数, 以便得到满意的控 制 效果
随着计算 机特 别是 微 机技术的 发展, PID 控 制 算 法 已能用微 机简 单实现, 由于软件系统的 灵 活 性, PID 算 法 可以得到修正而更加完善
我们阳江基地有数以千计的 采用 PID 控 制 的 调节器, 用于温 度 控 制 、压 力控 制 、流 量 控 制 , 在塑 杯 及 灌 装 生产 过 程 中 , 发挥 着重 要的 作 用
因 此 , 学习PID 控 制 的 基本 原 理, 合理的 设 计 PID 控 制 系统, 用好 、维 护 好 这 些 调节器, 对提 高 产 品 质 量 , 降 低 废 品 率 , 节约 能源 具 有十 分 重 要的 意义
本 课 程 从 系统的 角度 , 采用多 种 分 析方 法 , 详 细 讲 解 经典PID 控 制 的 基本 原 理和PID 参数的 整定方 法 , 简 介 现代数字PID 控 制 思 想 , 希 望 对大家 使 用 PID 调节器有所帮 助
二、调节系统的品质和特性 一 个调节系统的 品 质 可以用静 态 品 质 和 动 态 品 质 来 衡 量
所谓 静 态 品 质 就 是系统稳 定后 , 被 控 参数与 给 定值 间 的 差 值 的 大小
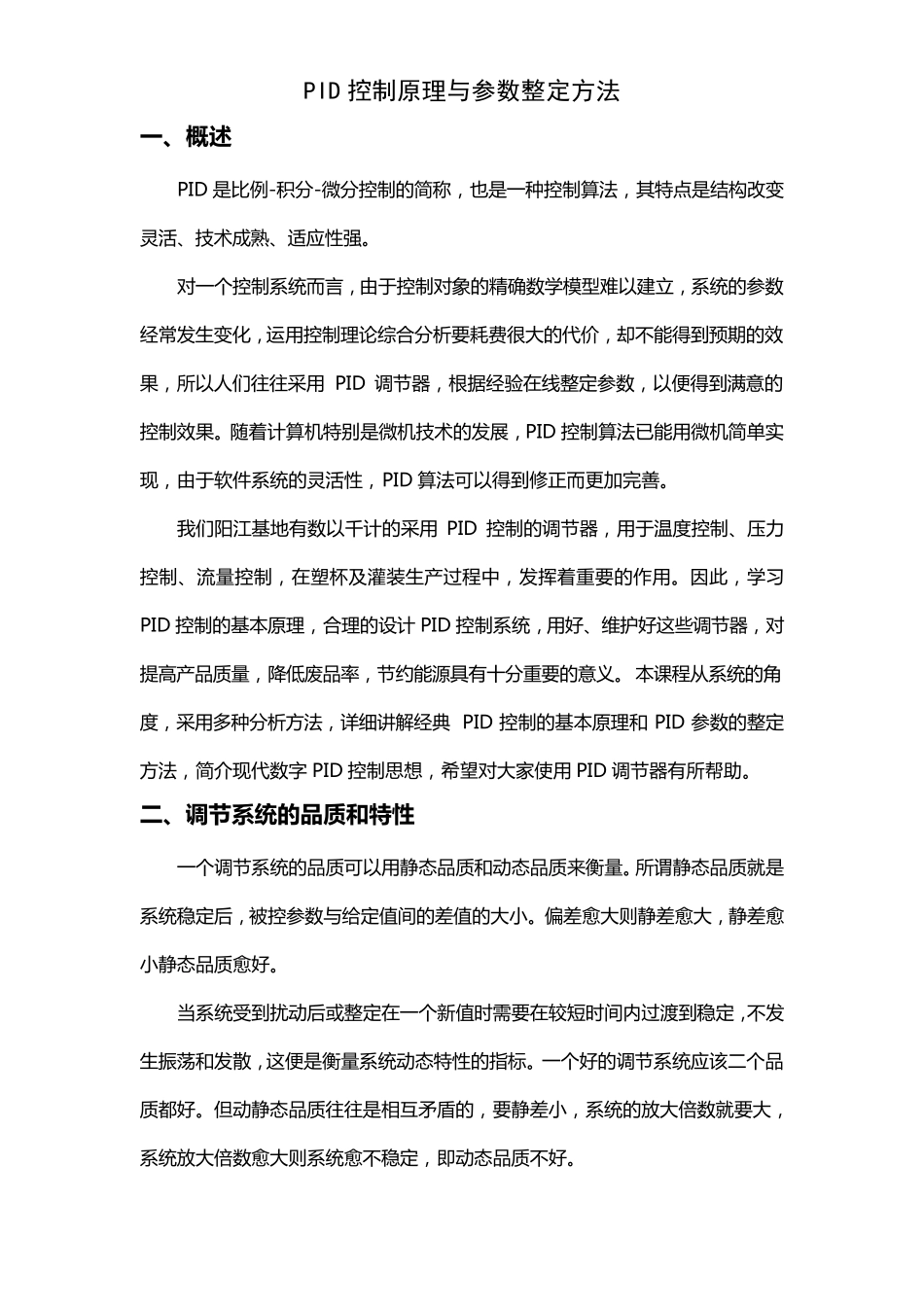
偏 差 愈 大则 静 差 愈 大, 静 差 愈小 静 态 品 质 愈 好