PID(Proportional Integral Differential)控制是比例、积分、微分控制的简称
在自动控制领域中,PID 控制是历史最久、生命力最强的基本控制方式
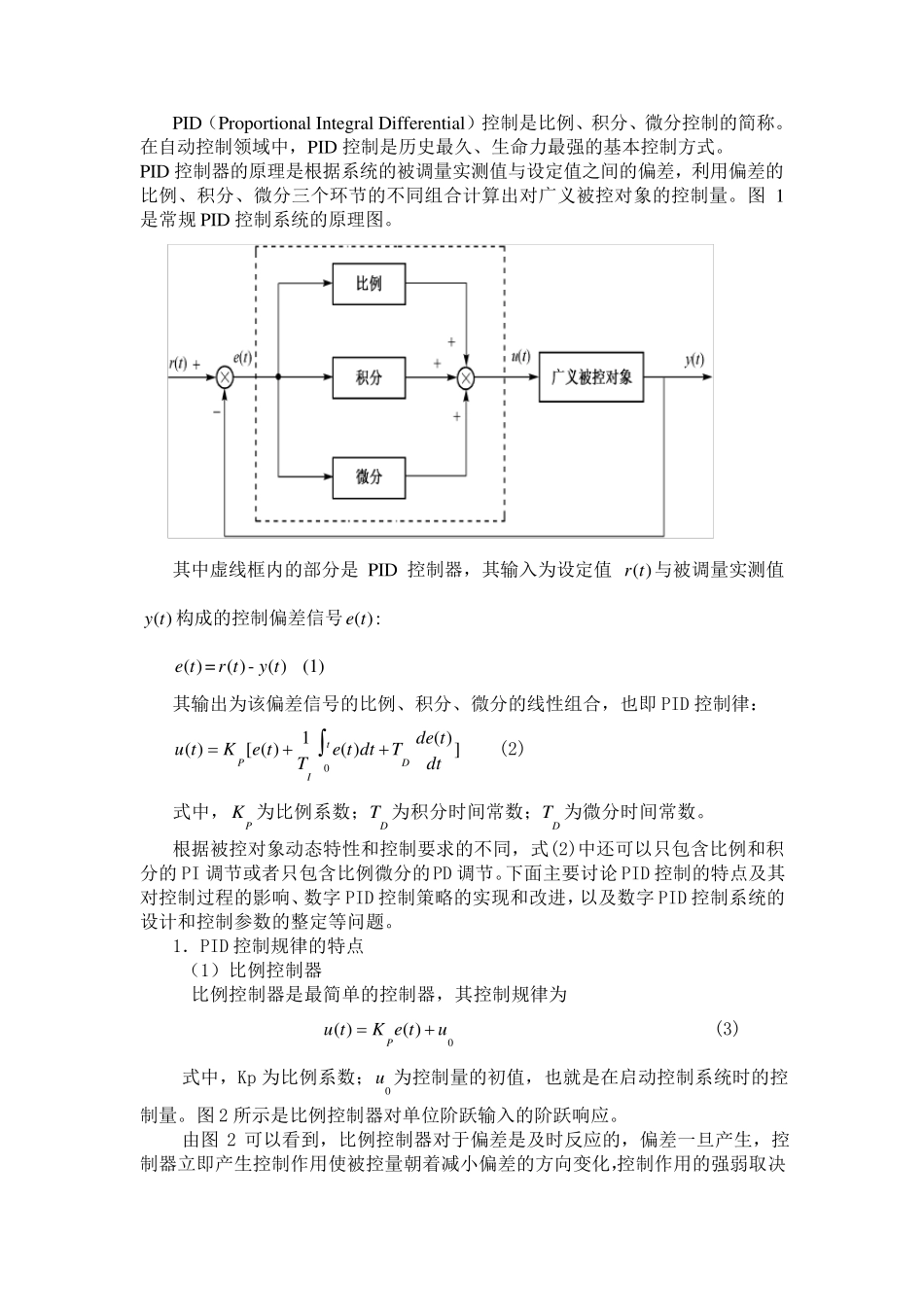
PID 控制器的原理是根据系统的被调量实测值与设定值之间的偏差,利用偏差的比例、积分、微分三个环节的不同组合计算出对广义被控对象的控制量
图 1是常规 PID 控制系统的原理图
其中虚线框内的部分是PID 控制器,其输入为设定值 )(tr与被调量实测值)(ty构成的控制偏差信号)(te: )(te=)(tr-)(ty (1) 其输出为该偏差信号的比例、积分、微分的线性组合,也即 PID 控制律: ])()(1)([)(0tDIPdttdeTdtteTteKtu (2) 式中,PK 为比例系数;DT 为积分时间常数;DT 为微分时间常数
根据被控对象动态特性和控制要求的不同,式(2)中还可以只包含比例和积分的 PI 调节或者只包含比例微分的PD 调节
下面主要讨论 PID 控制的特点及其对控制过程的影响、数字 PID 控制策略的实现和改进,以及数字 PID 控制系统的设计和控制参数的整定等问题
1.PID 控制规律的特点 (1)比例控制器 比例控制器是最简单的控制器,其控制规律为 0)()(uteKtuP (3) 式中,Kp 为比例系数;0u 为控制量的初值,也就是在启动控制系统时的控制量
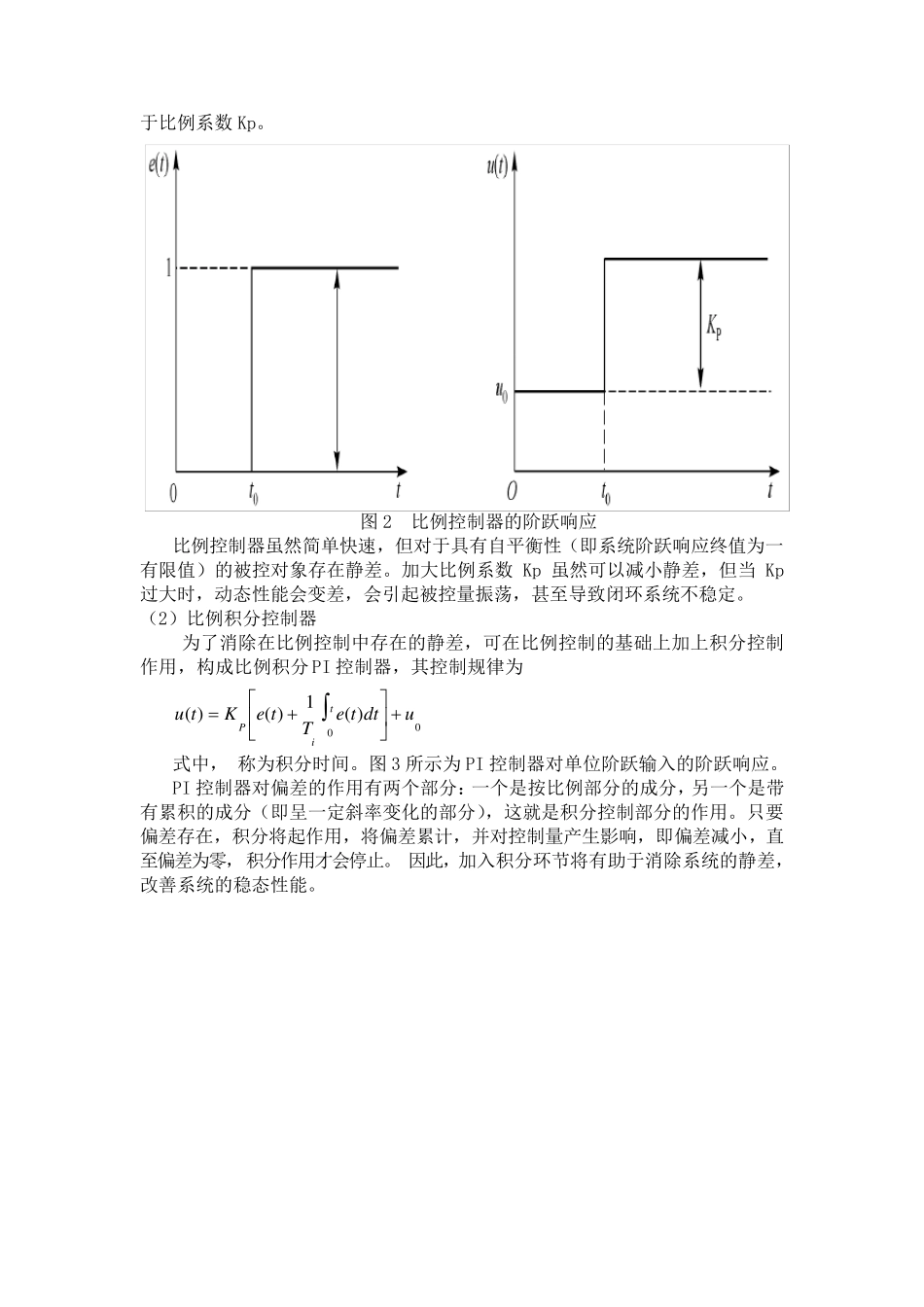
图 2 所示是比例控制器对单位阶跃输入的阶跃响应
由图 2 可以看到,比例控制器对于偏差是及时反应的,偏差一旦产生,控制器立即产生控制作用使被控量朝着减小偏差的方向变化,控制作用的强弱 取 决于比例系数Kp
图 2 比例控制器的阶跃响应 比例控制器虽然简单快速,但对于具有自平衡性(即系统阶跃响应终值为一有限值)的被控对象存在静差
加大比例系数Kp 虽然可以减小静差,但当 Kp过大时,动态性