PID 控制算法介绍与实现 一、PID 的数学模型 在工业应用中PID 及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID 算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在很多控制算法当中,PID 控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典
经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的
PID 算法的一般形式: PID 算法通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和
这里我们规定(在t时刻): 1
输入量为ᵅ(ᵆ) 2
输出量为ᵅ(ᵆ) 3
偏差量为ᵅᵅᵅ(ᵆ) = ᵅ(ᵆ) − ᵅ(ᵆ) ᵆ(ᵆ) = ᵅᵅ(ᵅᵅᵅ(ᵆ) + 1ᵄᵅ
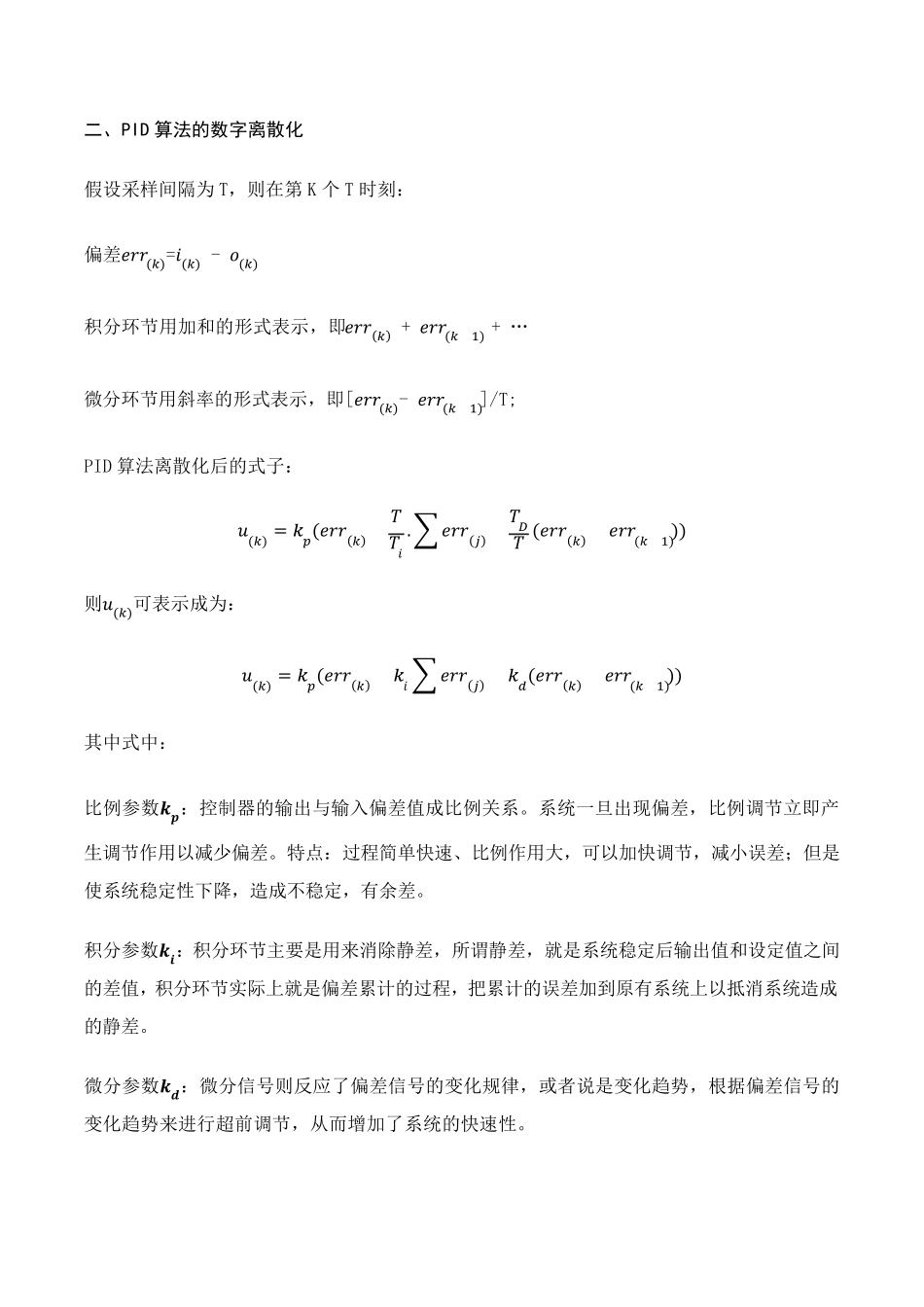
∫ ᵅᵅᵅ(ᵆ)ᵅᵆ +ᵄᵃ ᵅᵅᵅᵅ (ᵆ)ᵅᵆ) 二、PID 算法的数字离散化 假设采样间隔为T,则在第K 个T 时刻: 偏差ᵅᵅᵅ(ᵅ)=ᵅ(ᵅ) - ᵅ(ᵅ) 积分环节用加和的形式表示,即ᵅᵅᵅ(ᵅ) + ᵅᵅᵅ(ᵅ+1) + … 微分环节用斜率的形式表示,即[ᵅᵅᵅ(ᵅ)- ᵅᵅᵅ(ᵅ−1)]/T; PID 算法离散化后的式子: ᵆ(ᵅ) = ᵅᵅ(ᵅᵅᵅ(ᵅ) +ᵄᵄᵅ
∑ ᵅᵅᵅ(ᵅ) +ᵄᵃᵄ (ᵅᵅᵅ(ᵅ) −ᵅᵅᵅ(ᵅ−1))) 则ᵆ(ᵅ)可表示成为: ᵆ(ᵅ) = ᵅᵅ(ᵅᵅᵅ(ᵅ) +ᵅᵅ ∑ ᵅᵅᵅ(ᵅ) +ᵅᵅ(ᵅᵅᵅ(ᵅ) −ᵅᵅᵅ(ᵅ−1))) 其中式中: 比例参数ᵈᵉ:控制器的输出与输入偏差值成比例关系
系统一旦出现偏差,比例调节立即产生调节作用以减少偏差
特点:过程简单快速、比例作用大,可以加快调节,减小误差;但是使系统稳定性下降,造成不稳定,有余差
积分参数ᵈᵈ:积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差