APM for PX4 飞控开发笔记 第五章:PWM、PPM、S
bus 与DSM2 ——sw 笨笨 编写 1
介绍 要进行飞控开发,了解控制信号是基本知识
用于航模的飞控主要的执行设备就是舵机和电调,那么跟舵机相关的信号都有哪些,他们的作用是什么,硬件协议是什么,软件协议是什么,有什么区别,怎么用
这些就是本文下面要跟大家讨论的问题
我个人常用的航模中的控制信号主要有PWM、PPM 和 S
还有许多其他信号,但是个人接触的少就不在这里卖了
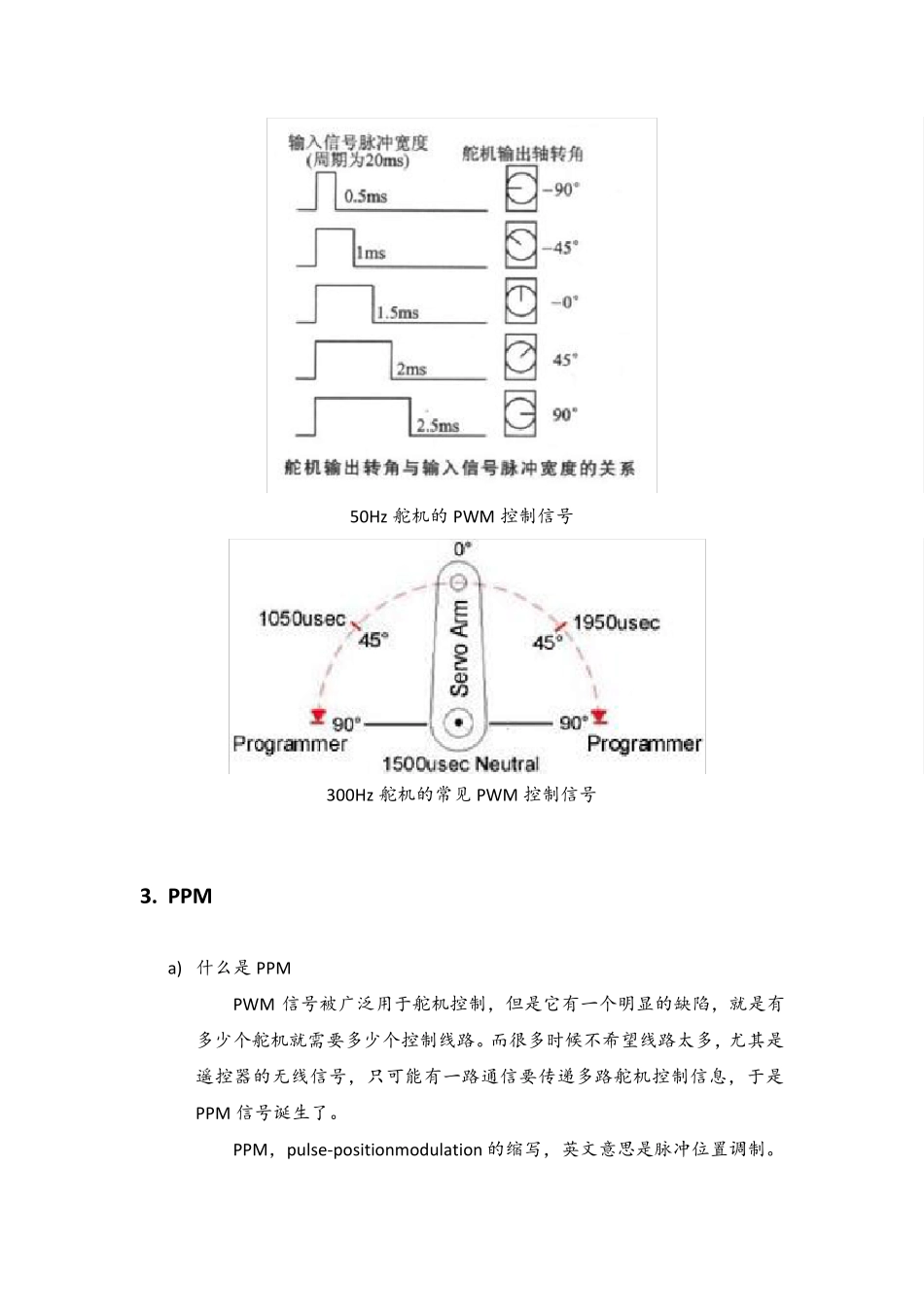
PWM a) 什么是 PWM PWM ,Pulse Width Modulation 的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制
这是一种古老而通用的工业信号,是一种最常见的控制信号
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出
如下图所示: 而航模常用的PWM 信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数
PWM 的优点很明显: 由于传输过程全部使用满电压传输,非 0 即 1,很像数字信号,所以他拥有了数字信号的抗干扰能力
脉宽的调节是连续的,使得它能够传输模拟信号
PWM 信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集 PWM 信号
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC 都会存在纹波等等,这些因素不会干扰信号的传输
b) PWM 通信协议 高电平有效
高电平电压:常见 4
8~6V,也有使用3
3V 和更高电压的,要看舵机的承受能力
信号周期:常见 50Hz 和 300Hz 两种,前者被称为模拟舵机,后者被称为数字舵机
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信