凸轮轮廓及其 综 合 1
凸轮机构从动件的位移 凸轮是把一种运动转化为另一种运动的装置
凸轮的廓线和从动件一起实现运动形式的转换
凸轮通常是为定轴转动,凸轮旋转运动可被转化成摆动、直线运动或是两者的结合
凸轮机构设计的内容之一是凸轮廓线的设计
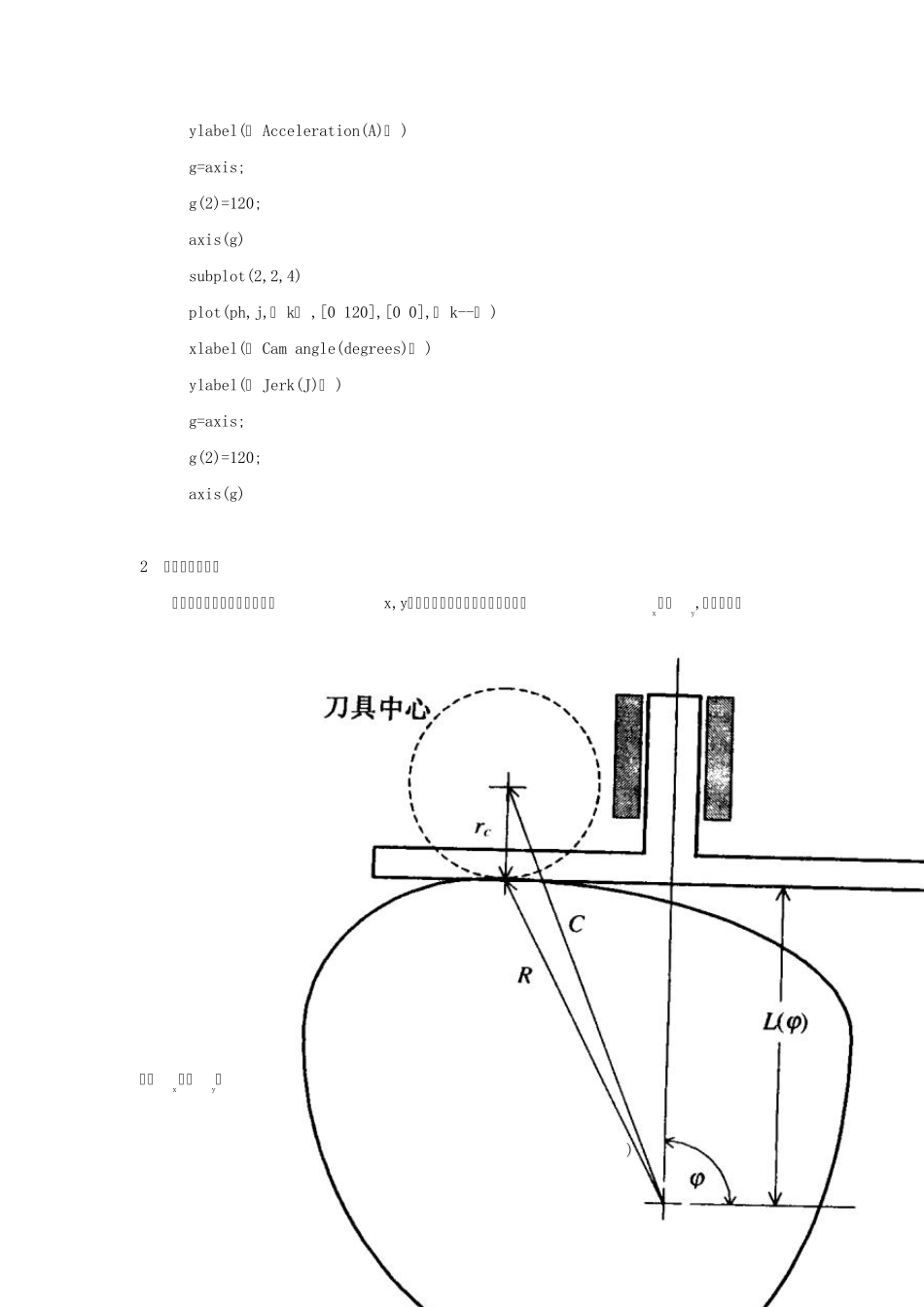
定义一个凸轮基圆rb作为最小的圆周半径
从动件的运动方程如下: L( )=rb+s( ) 设凸轮的推程运动角和回程运动角均为β , 从动件的运动规律均为正弦加速度运动规律,则有: s( )= h( -21 sin(2π /β )) 0≤ ≤ β s( )= h- h( -21 sin(2π ( -β /β )) β ≤ ≤ 2β s( )= 0 2β ≤ ≤ 2π 上式是从动件的位移,h 是从动件的最大位移,并且0≤ β ≤ π
如果假设凸轮的旋转速度ω = d / dt 是个常量,则速度υ 、加速度a 和瞬时加速度j(加速度对时间求异)分别如下: 速度: υ ( )= h ( 1-cos(2π /β )) 0≤ ≤ β υ ( )=- h ( 1-cos(2π ( -β )/β ) β ≤ ≤ 2β υ ( )= 0 2β ≤ ≤ 2π 加速度: a( )=222h sin(2π /β )) 0≤ ≤ β a( )= -222h sin(2π ( -β )/β ) β ≤ ≤ 2β a( )= 0 2β ≤ ≤ 2π 瞬时加速度: j( )=3324h cos(2π /β )) 0≤ ≤ β j( )= -3324h cos(2π ( -β )/β ) β ≤ ≤ 2β j( )= 0 2β ≤ ≤ 2π 定义无量纲位移S=s/h、无量纲速度V=υ /ω h、无量纲加速度A=a/