2铰链四杆机构的基本性质1
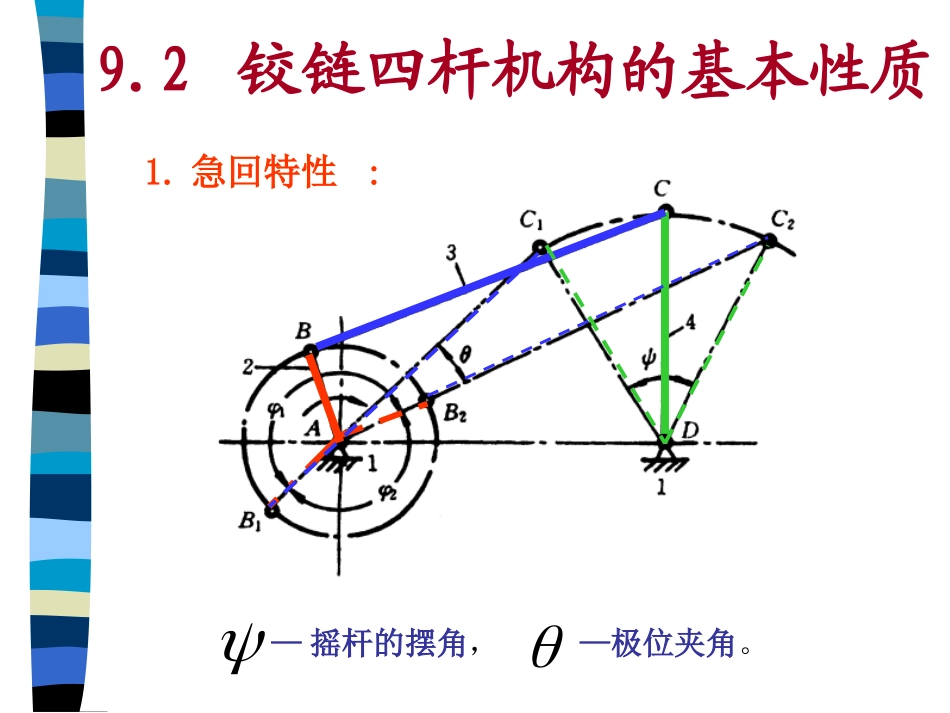
急回特性:—摇杆的摆角,—极位夹角
为描述从动摇杆的急回特性,在此引入行程速比系数K,即:K=180+180-K值的大小反映了急回运动特性的显著程度
K值的大小取决于极位夹角,角越大,K值越大,急回运动特性越明显;反之,则愈不明显
当时,K=1,机构无急回特性
0若在设计机构时先给定K值,则:11180KK在生产实际中,常利用机构的急回运动来缩短非生产时间,提高生产率,如牛头刨床、往复式运输机等
2铰链四杆机构的基本性质2
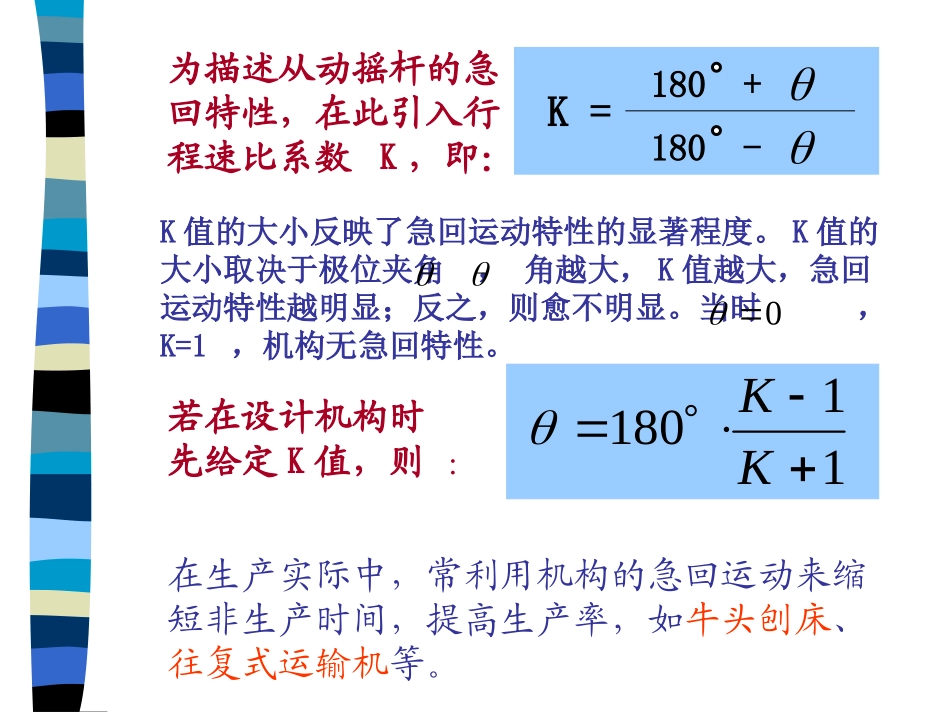
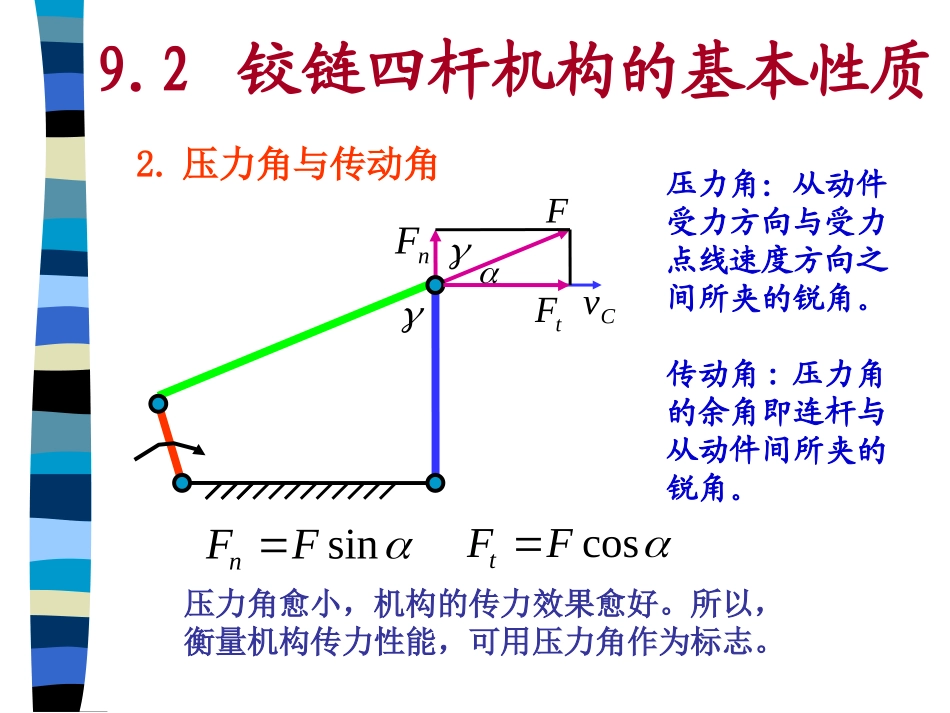
压力角与传动角costFFsinnFF压力角愈小,机构的传力效果愈好
所以,衡量机构传力性能,可用压力角作为标志
CvtFnFF压力角:从动件受力方向与受力点线速度方向之间所夹的锐角
传动角:压力角的余角即连杆与从动件间所夹的锐角
在连杆机构中,为度量方便,常用压力角的余角即连杆与从动件间所夹的锐角(传动角)检验机构的传力性能
min传动角愈大,机构的传力性能愈好,反之则不利于机构中力的传递
机构运转过程中,传动角是变化的,机构出现最小传动角的位置正好是传力效果最差的位置,也是检验其传力性能的关键位置
CvtFnFF设计要求:曲柄摇杆机构,以曲柄为原动件时,其最小传动角发生在曲柄与机架两次共线位置之一
minABCD9
2铰链四杆机构的基本性质3
死点状态0机构传动角(即)的位置称为死点位置
90机构处于死点位置,从动件会出现卡死(机构自锁)或运动方向不确定的现象
措施和应用9
3平面四杆机构的设计设计类型:1
实现给定的运动规律:给定行程速比系数以实现预期的急回特性、实现连杆的几组给定位置等
实现给定的运动轨迹:要求连杆上某点沿着给定轨迹运动等
设计目标:根据给定的运动条件,选定机构的类型,确定机构中各构件的尺寸参数
设计方法:图解法、实验