PID(比例—积分—微分)控制器,广泛应用于传感器和工业控制中
PID 控制算法的一种传统表示式为: 式中:t—时间;E—控制过程变量,E 通常是跟踪误差,等于传感器实际测量值减设置点值;P—比例增量;I—积分增量的反商;D—微分增量
参量P、I 和D 是特定应用中控制器的可调设置
控制器用控制工作OUTPUT,定标之后并经调节控制器(例如开关)迫使控制过程接通和稳定在设置点(即 E=0)
方程(1)右边第一项代表P 模式或 P 操作,这是表示控制环路速度和稳定性的基本模式
有时单独实现 P 模式
意想不到的P 模式原来是误差百分比,P模式可保证过程将稳定在设置点
事实上,实际的P 模式控制器就稳定在不是设置点的地方(即 E≠0)
下面简化的P 模式模型可以说明此疑题: 在这里我们假定传感器的测量M 正比于控制工作 OUTPUT
假定定标因数C 是1 并达到 OUTPUT=SET POINT,于是无限增益 P 包含在方程(2)中是与事实不符的
所以,P 模式不可能完全消除误差
为了克服上面所讨论的P 模式局限性,所以,把方程(1)中第 2 项积分I 模式引入计算中
此积分表示在规定时间标定内所有上述误差,它等于稍微改变的设置点,所以,控制器完全可消除误差
虽然 I 模式能平均噪声,但往往会积聚慢变化的误差
虽然现在的误差为零,但控制器力图修正过去的误差,调整过程偏离设置点并导致控制不稳定
这种行为特别可能发生在慢速控制系统中,在这种情况下,必须组合 P 模式来获得控制稳定性
方程 1 中的第 3 项 D 模式用于加速控制运算以及防止过反应
D 模式只在过程正在迅速变化时起作用
若有突然干扰使过程偏离设置点,则 D 模式在控制工作范围内立即产生 1 个小的响应来快速降低过程误差
另外,若逼近设置点的速率太快,则 D 模式将减速过程以避免控制过冲
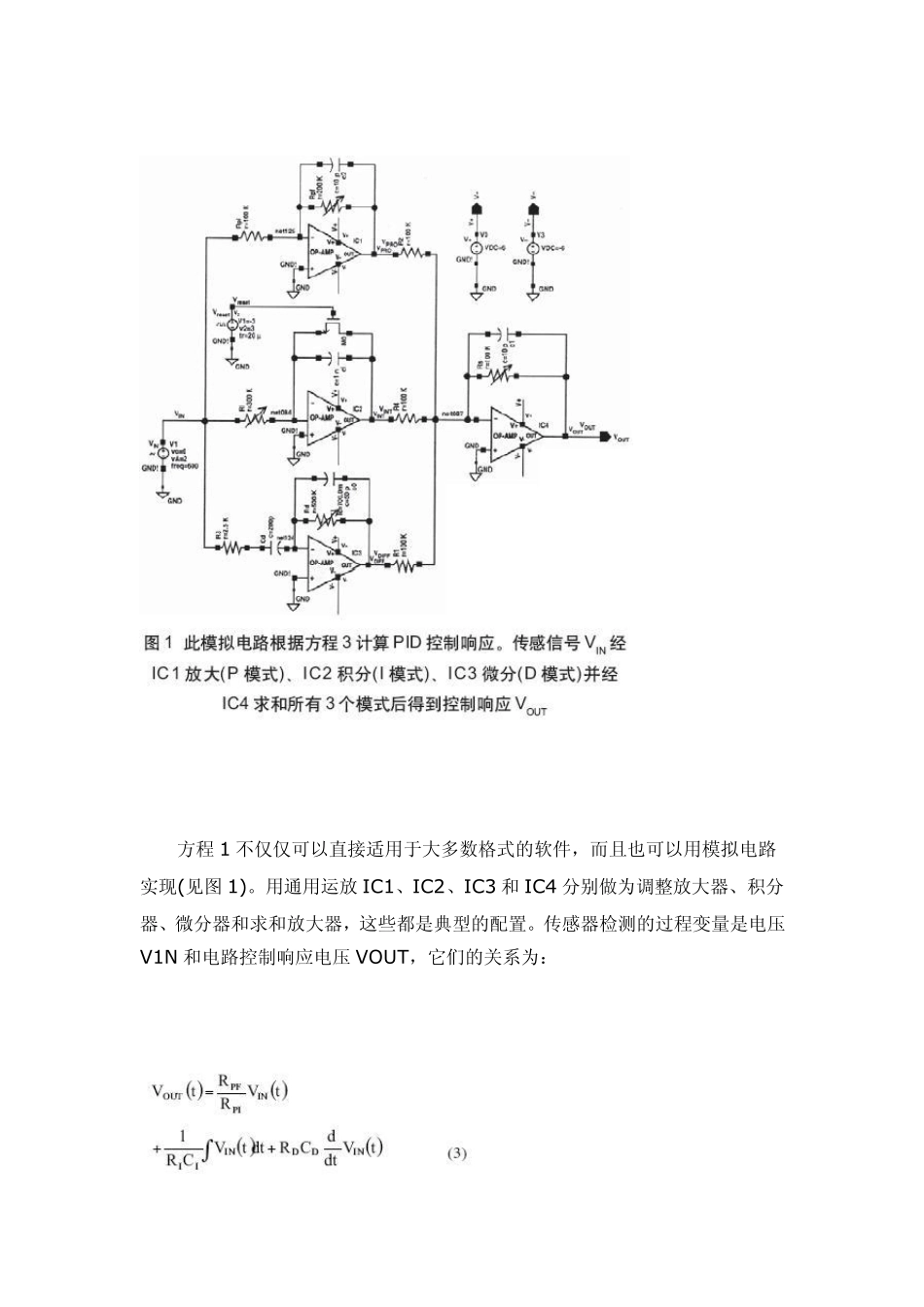
数字上,D 模式中的微