PID 调节器 在机电控制系统中,为了改进反馈控制系统的性能,人们经常选择各种各样的校正装置,其中最简单最通用的是比例—积分—微分校正装置,简称为PID 校正装置或PID 控制器
这里P 代表比例,I 代表积分,D 代表微分
(一) 比例控制器(P 调节) 在比例控制器中,调节规律是:控制器的输出信号u 与偏差e 成比例
其方程如下: eKuP (7
7) 式中PK 称为比例增益
其传递函数表示为 PjKsG)( (7
8) 从减小偏差的角度出发,我们应该增加PK , 但是另一方面,PK 还影响系统的稳定性,PK 增加通常导致系统的稳定性下降,过大的PK 往往使系统产生激烈的振荡和不稳定
因此在设计时必须合理的优化PK ,在满足精度要求下选择适当的PK 值
增益调整是系统校正与综合时最基本、最简单的方法
这里,我们主要讨论在单位反馈系统中,应用M 圆的概念来确定开环增益,使系统闭环谐振峰值满足某一期望值
在乃奎斯特图上,M 圆的轨迹如图7-14 所示
如果rM > 1,那么从原点画一条到所7-14 M 圆 期望的rM 圆的切线,该切线与负轴的夹角为ψ , 如图7-14 所示
根据三角关系,有 rrrrrMMMMM111si n222 (7
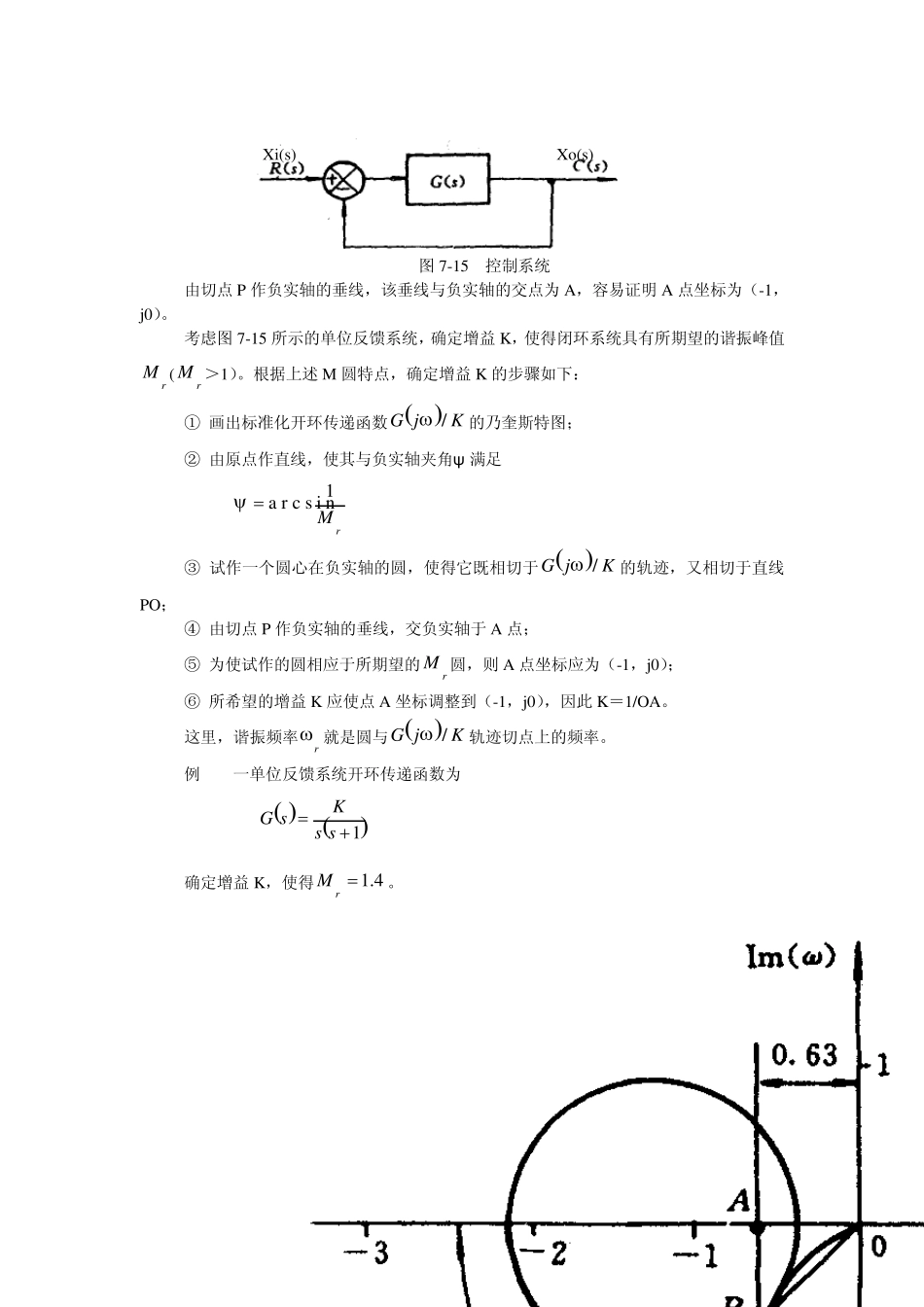
9) 图7-15 控制系统 由切点P 作负实轴的垂线,该垂线与负实轴的交点为A,容易证明A 点坐标为(-1,j0)
考虑图7-15 所示的单位反馈系统,确定增益K,使得闭环系统具有所期望的谐振峰值rM (rM >1)
根据上述M 圆特点,确定增益K 的步骤如下: ① 画出标准化开环传递函数 KjG/的乃奎斯特图; ② 由原点作直线,使其与负实轴夹角ψ 满足 rM1a r c s i n ③ 试作一个圆心在负实轴的圆,使得它既相切于 KjG/的轨迹,又相切于直线PO; ④ 由切点P 作负实轴的垂线