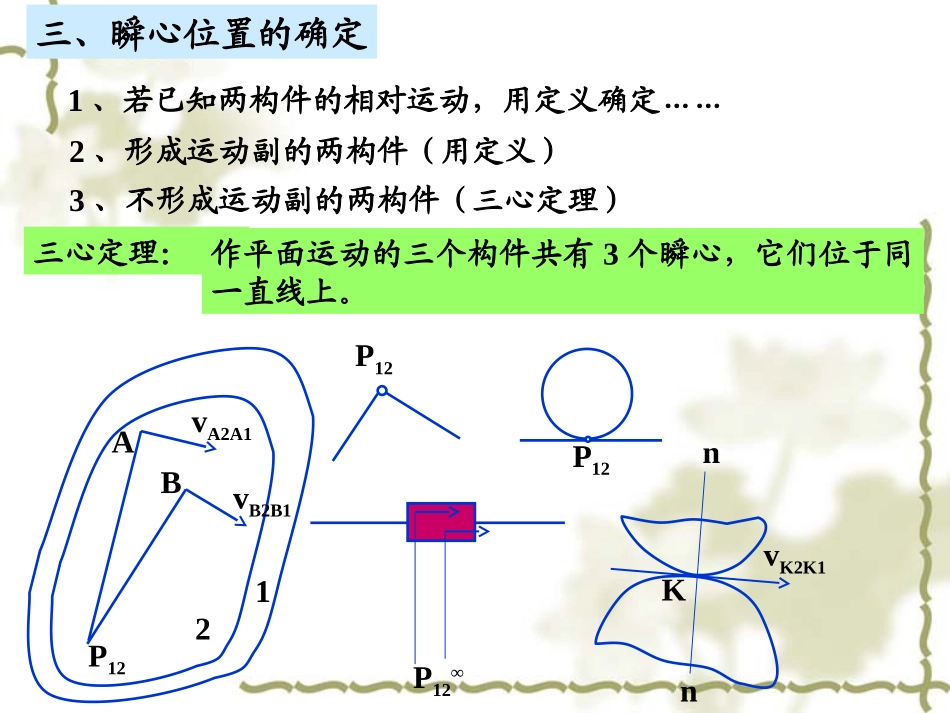
三心定理:三、瞬心位置的确定1、若已知两构件的相对运动,用定义确定……2、形成运动副的两构件(用定义)3、不形成运动副的两构件(三心定理)作平面运动的三个构件共有3个瞬心,它们位于同一直线上
P12P12∞P1221AvB2B1BP12vA2A1nnvK2K1K三心定理证明P12SP13123vS2S1vS3S132SSvv1313SSSSvvv1312SSSSvv设S为12的瞬心,由瞬心定义,得根据相对运动原理,得1212SSSSvvv和所以实际上,若S不在P12P13上,则1312SSSSvv所以,S必在P12P13上
P14P34P23P24P12P13例:找出下面机构所有的速度瞬心
413211124362)14(42)1(NNK速度瞬心数目:四、利用瞬心对机构进行运动分析例1:图示机构中,已知lAB、lBC和,构件1以ω逆时针方向转动
求:①机构的全部瞬心位置;②从动件3的速度
P124P14123P23P34→∞P13P2462)14(42)1(NNK速度瞬心数目:ABC11131413PPClvv1例2:凸轮以匀速逆时针转动,求该位置时从动件2的速度V2
速度瞬心法只能对机构进行速度分析,不能加速度分析
构件数目较少时用
123BP13P12P23→∞12131212PPPlvv1v2已知机构各构件的长度和求:11,,,,,3322速度影像的用处、注意点速度多边形一、在同一构件上点间的速度和加速度的求法(基点法),Ev,Cv,Ca,EaA4B1DE23C11一、速度分析方向⊥CDABCB⊥⊥大小
任取一点p作为极点,任意长度矢量代表速度矢量CBBCvvvABl1pbBvmmsmpbvBV/EBECCEvvvvvB