SimMechanics SimMechanics 模块组提供了建模的必要模块,可以直接在Simu link 中使用
SimMechanics 支持用户自定义的构件模块,可以设定质量和转动惯量
通过节点联接各个构件来表示可能的相对运动,还可以在适当的地方添加运动约束、驱动力
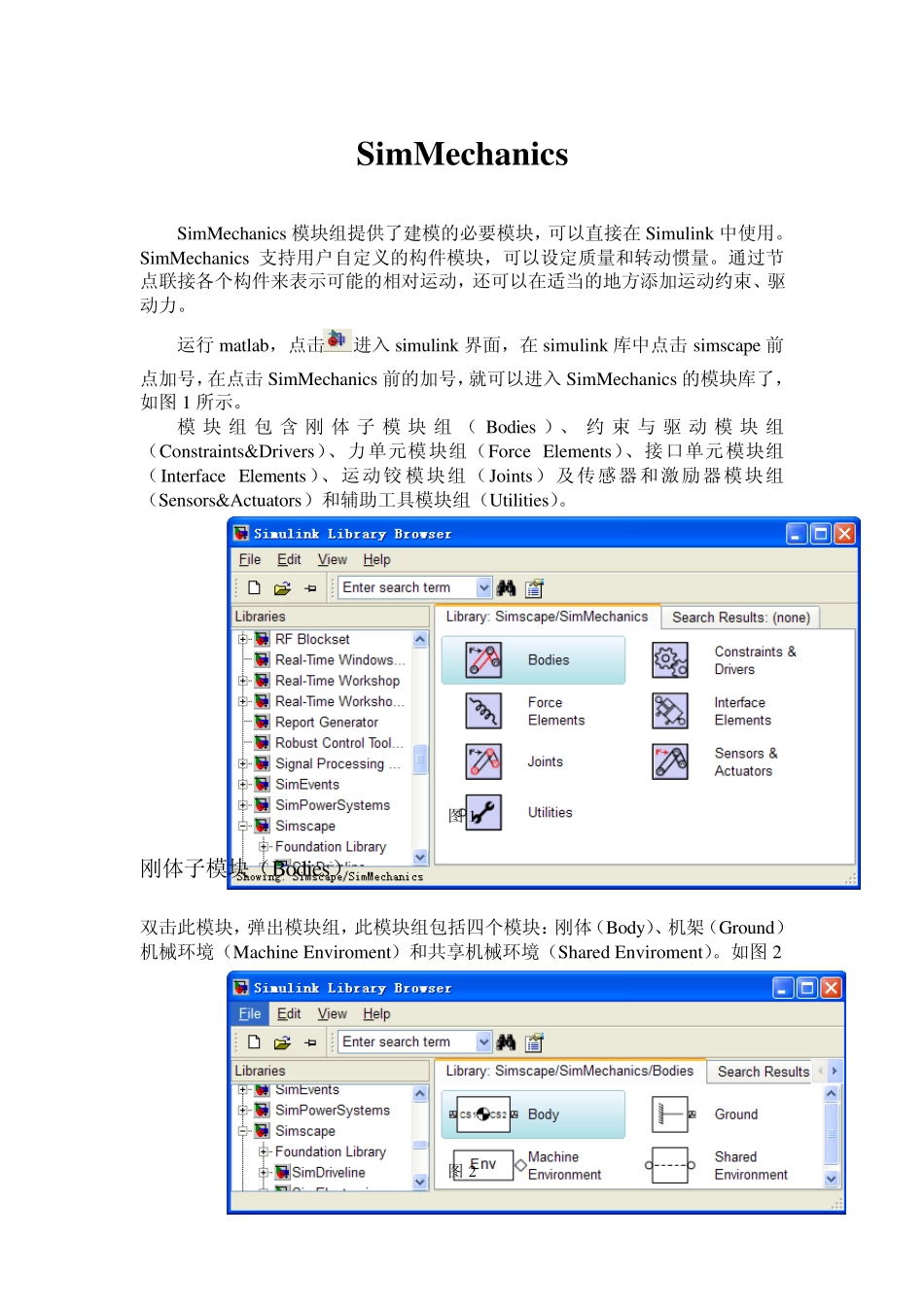
运行 matlab,点击进入 simu link 界面,在simu link 库中点击 simscape 前点加号,在点击 SimMechanics 前的加号,就可以进入 SimMechanics 的模块库了,如图 1 所示
模块组包 含 刚 体 子 模块组( Bodies )、 约束与 驱 动模块组(Constraints&Driv ers)、力单元模块组(Force Elements)、接口单元模块组(Interface Elements)、运动铰 模块组(Joints)及传感器和激励器模块组(Sensors&Actu ators)和辅助工具模块组(Utilities)
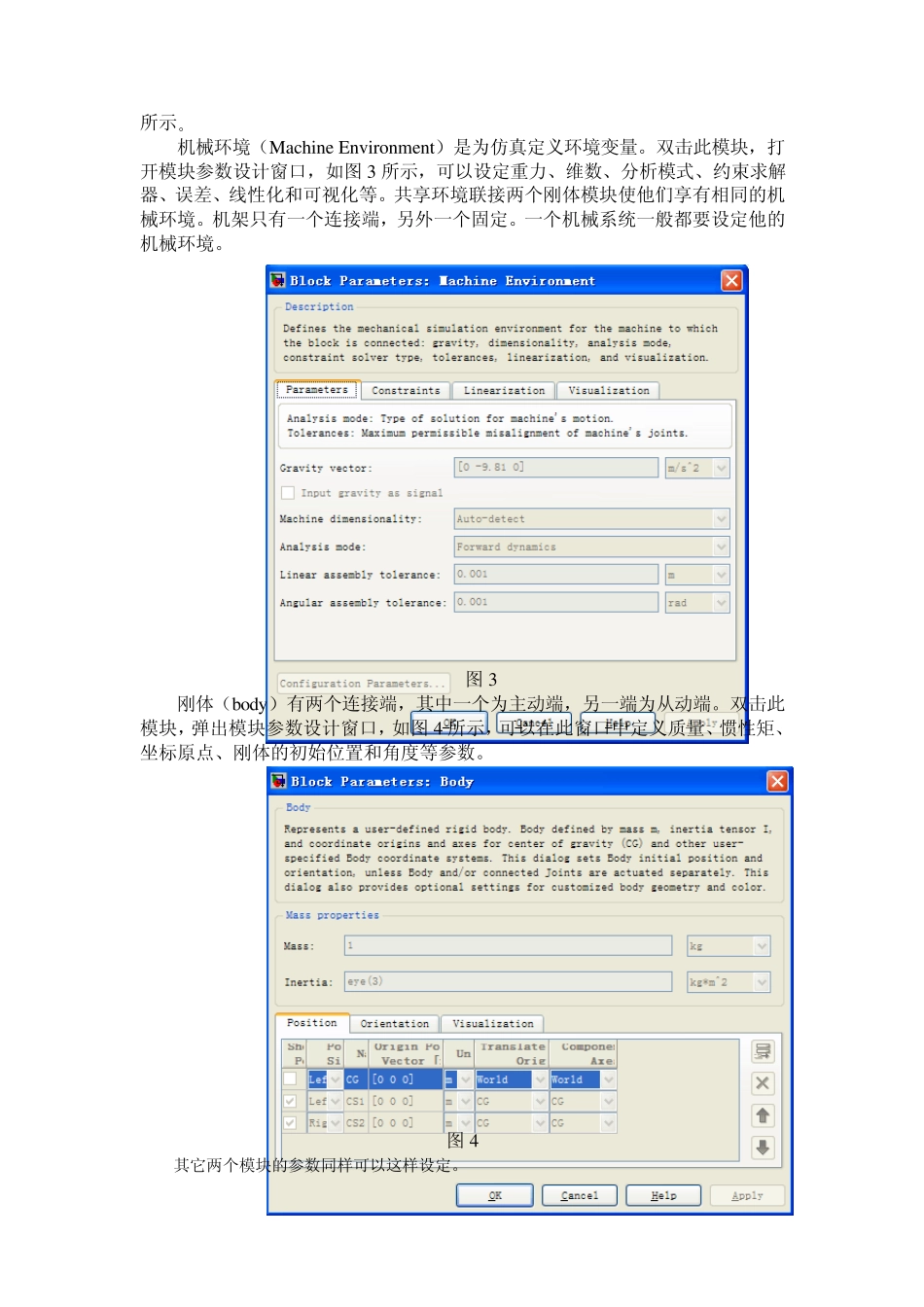
图 1 刚体子模块(Bodies) 双击此模块,弹出模块组,此模块组包括四个模块:刚体(Body )、机架(Grou nd)机械环境(Machine Env iroment)和共享机械环境(Shared Env iroment)
如图 2 图 2 所示
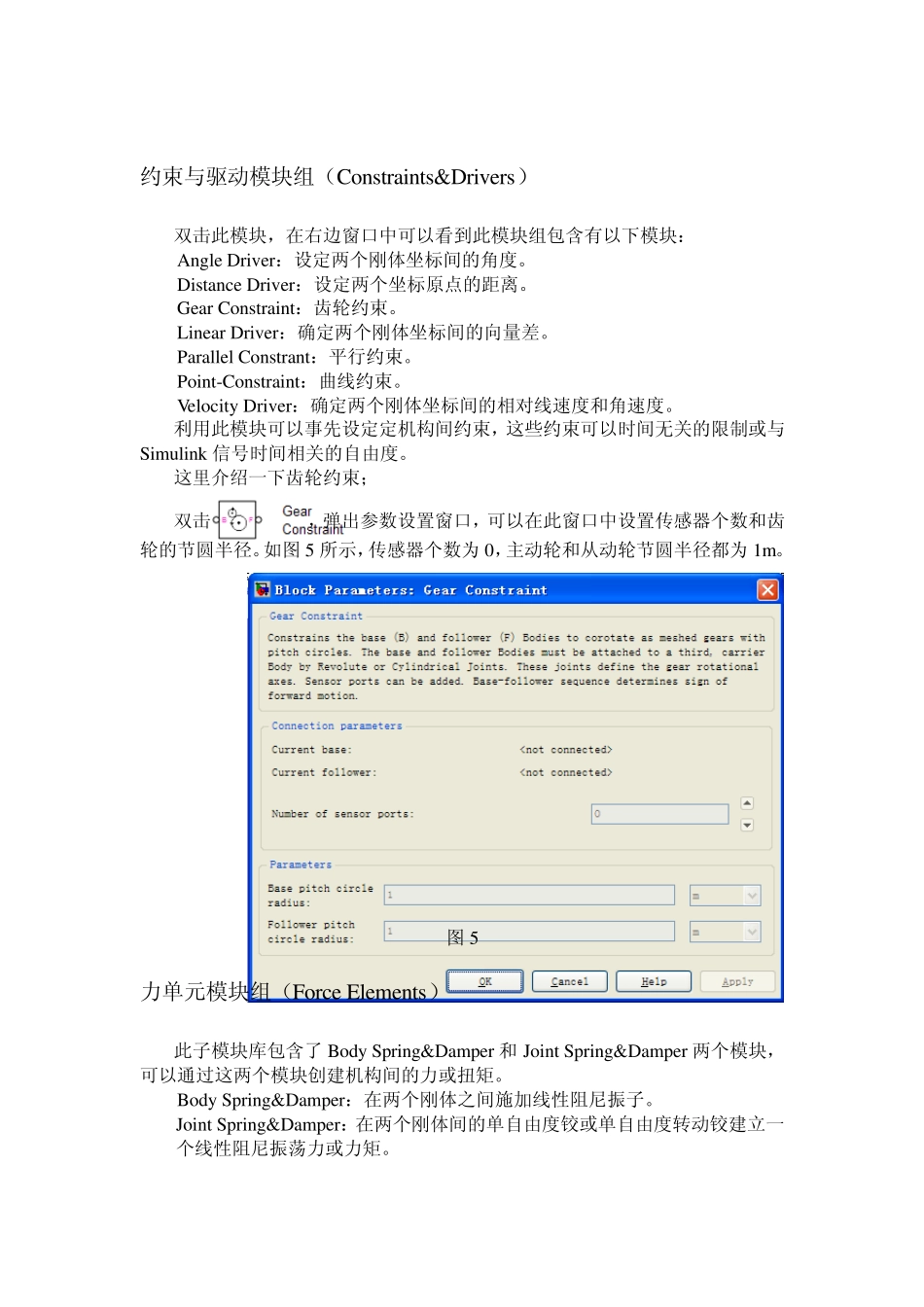
机械环境(Machine Env ironment)是为仿真定义环境变量
双击此模块,打开模块参数设计窗口,如图3 所示,可以设定重力、维数、分析模式、约束求解器、误差、线性化和可视化等
共享环境联接两个刚体模块使他们享有相同的机械环境
机架只有一个连接端,另外一个固定
一个机械系统一般都要设定他的机械环境
图3 刚体(body )有两个连接端,其中一个为主动端,另一端为从动端
双击此模块,弹出模块参数设计窗口,如图4 所示,可以在此窗口中定义质量、惯性矩、坐标原点、刚体的