-- -- )4)(3)(1(2)(sssssG经典PID与模糊PID控制 一、PID 控制规律 控制输出由三部分组成: 比例环节——根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差
比例系数的作用是加快系统的响应速度,比例系数越大,系统响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳定;比例系数过小,会降低系统调节精度,系统响应速度变慢,调节时间变长,系统动态、静态特性变坏
比例控制是最简单的控制结构,然而,它也能使系统满足某一方面的特性要求,如GM、PM、稳态误差等
积分环节——用于消除静差,提高系统的无差度
积分作用的强弱取决于积分时间常数TI 的大小, TI 越小,积分作用越强
需要注意的是积分作用过强,可能引起系统的不稳定
微分环节——根据偏差量的变化趋势调节系统控制量,在偏差信号发生较大的变化以前,提前引入一个早期的校正注意的是微分作用过强,可能引起系统的振荡
已知被控对象的数学模型: 二、经典PID 设计 由于在设计PID 控制器中要调整3 个参数,根轨迹与波特图设计方法通常不被直接采用
Ziegler 与Nichols 发展了PID 调节器设计方法
该方法基于简单的稳定性分析方法
首先,置0IDKK,然后增加比例系数直至系统开始振荡(即闭环系统极点在jw 轴上)
再将该比例系数乘0
6,其他参数按下式计算: mPKK6
0 mPDwPiKK4 PiwKKmPI 式中,mK 为系统开始振荡时的K 值;mw 为振荡频率
然而,该设计方法在设计过程中没有考虑任何特性要求
但是Ziegler 与Nichols 发现这种设计方法给予过程控制器提供了好的工作性能
工程师们的多年实践经验证明,这种设计方法的确是一种好的方法
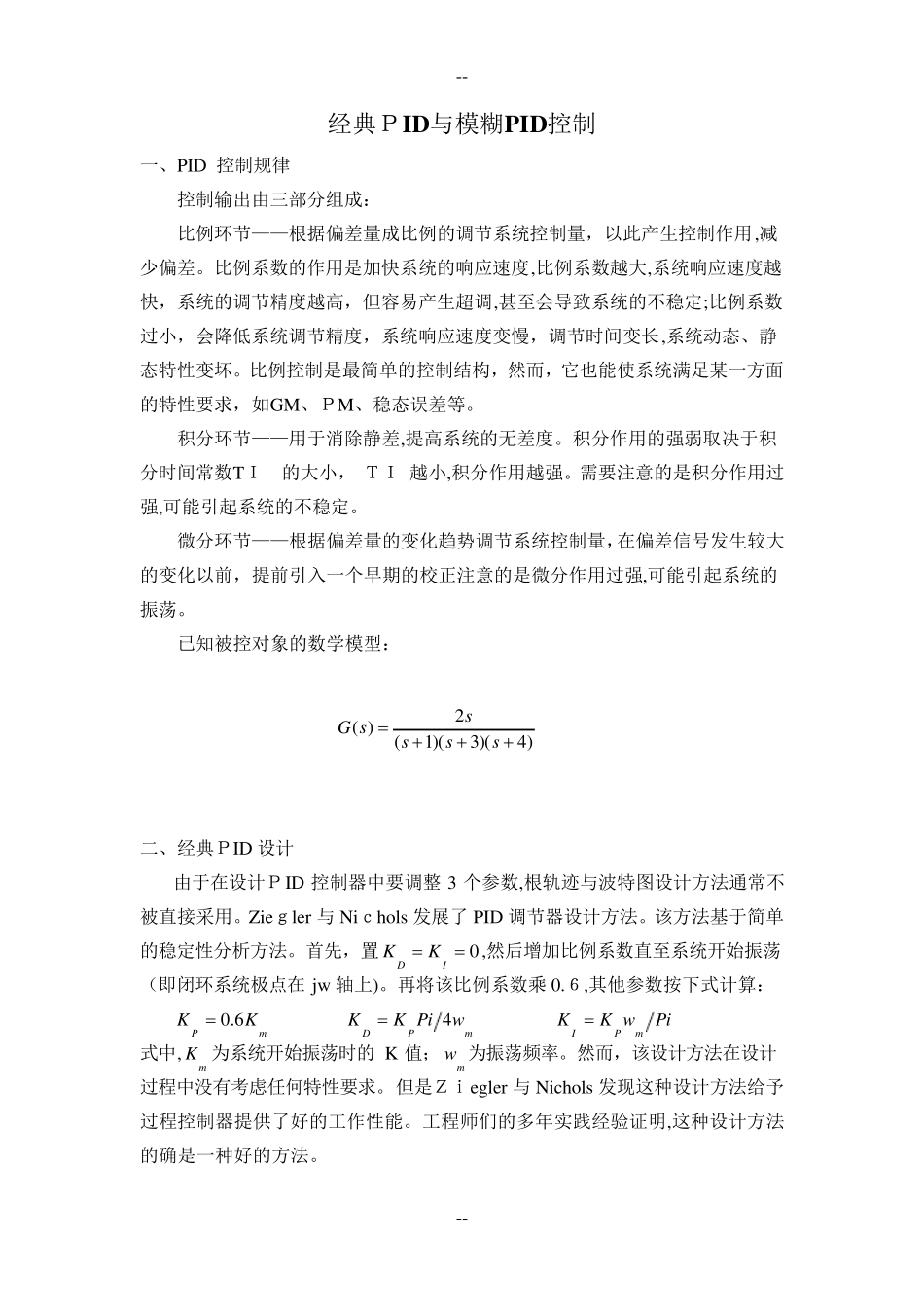
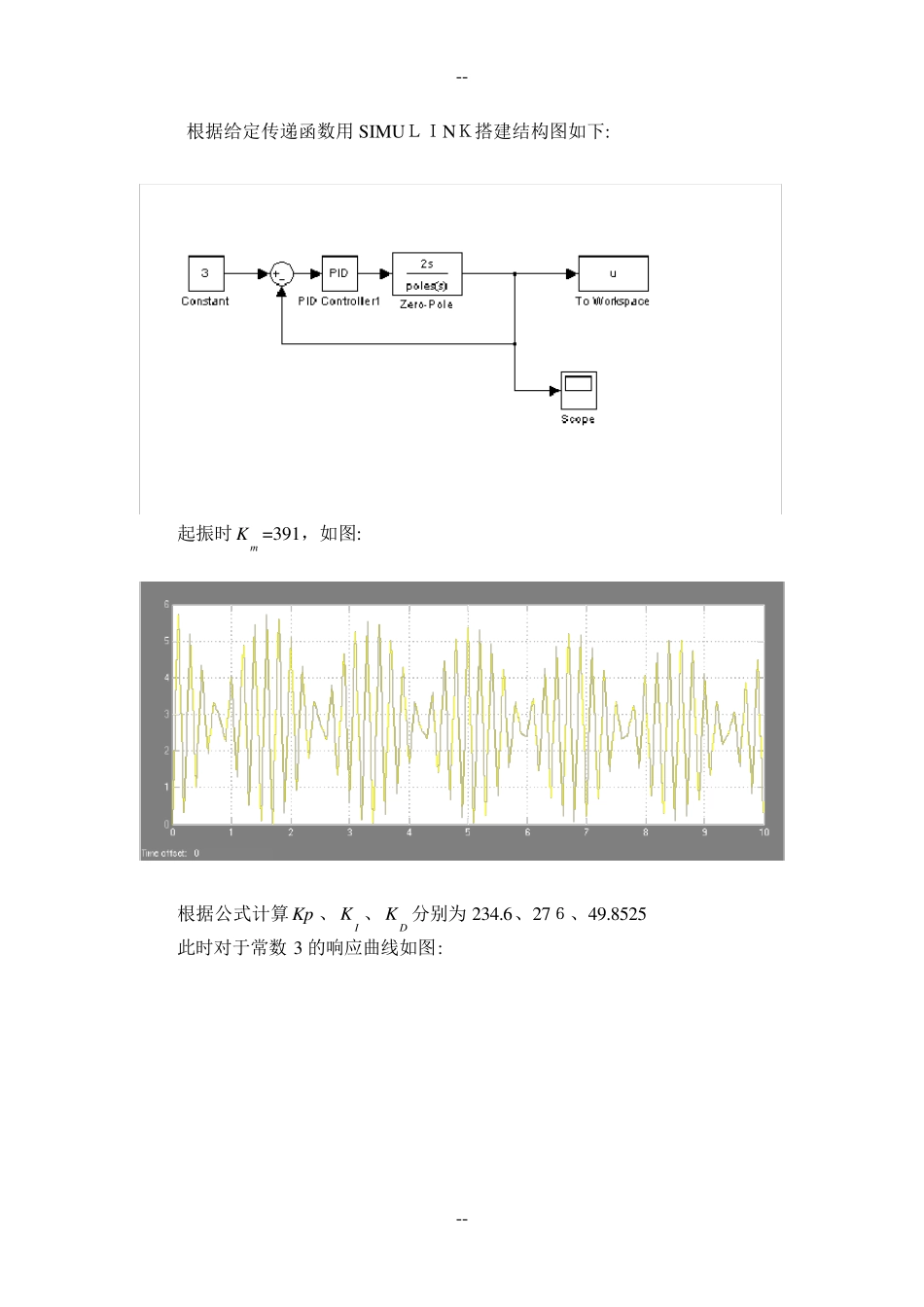
-- -- 根据给定传递函数用SIMULINK搭建结构图如下: 起振时mK =391,如