1 / 5 微分先行的PID 控制算法实验目的通过上机实践操作, 使学生能够直观理解课堂上所讲的内容
学生在计算机上结合课程教学用的Matlab 语言或 Simulink 构建仿真模型实现微分先行的PID控制算法,培养学生的动手实践能力
实验内容用 Matlab 语言或 Simulink 构建仿真模型实现微分先行的PID 控制算法题目:控制对象为170800seGt,采样时间为 20s,输入信号为带有高频干扰的方波信号:)03
0sin(05
0))0005
0(()(ttsquaresigntr,执行机构输出限制在[-10,10],仿真时间为8000s ;其中,0
418,kd0
006,ki0
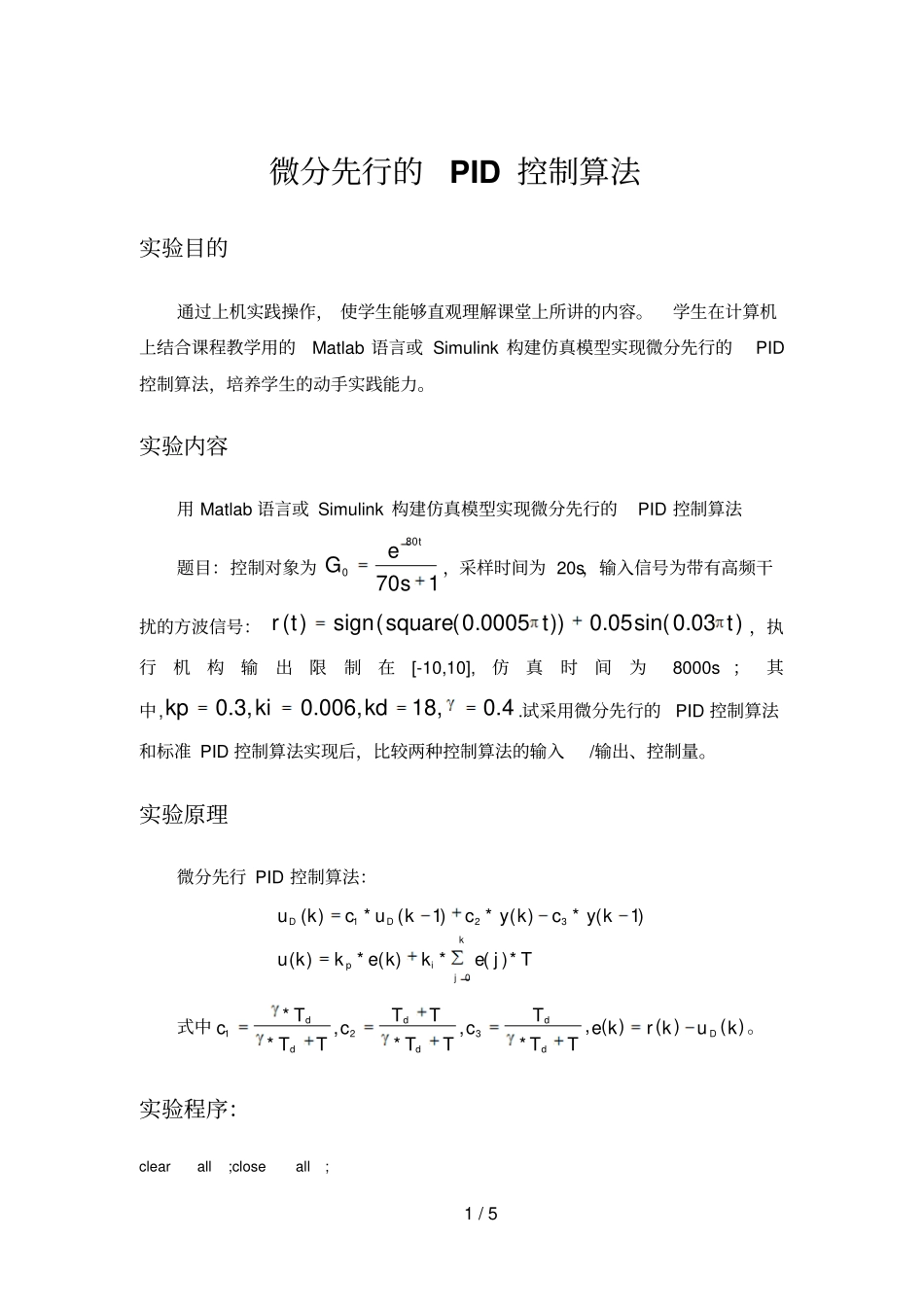
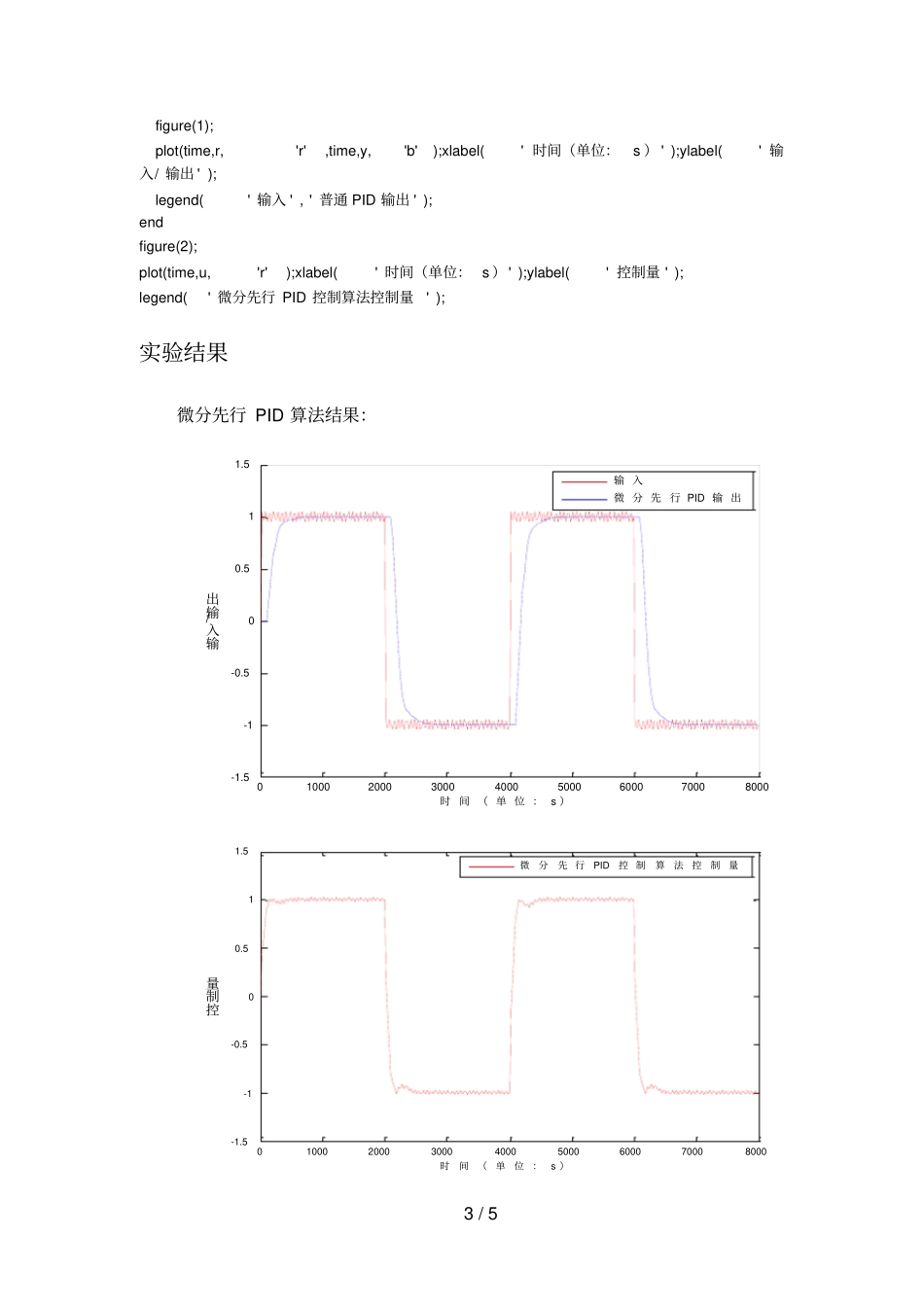
试采用微分先行的PID 控制算法和标准 PID 控制算法实现后,比较两种控制算法的输入/输出、控制量
实验原理微分先行 PID 控制算法:kjipDDTjekkekkukyckyckucku0321*)(*)(*)()1(*)(*)1(*)(式中)()()(,*,*,**321kukrkeTTTcTTTTcTTTcDdddddd
实验程序:clear all;close all;2 / 5 ts=20;M=2;ki=0
006;kd=18;kp=0
3;gama=0
4;sys=tf(1,[70 1],'inputdelay',80);dsys=c2d(sys,ts,'zoh');[num,den]=tfdata(dsys,'v');ud_1=0;y_1=0;e_1=0;ei=0;u_1=0;u_2=0;u_3=0;u_4=0;u_5=0;Td=kd/kp;c1=gama*Td/(gama*Td+ts);c2=(Td+ts)/(gama*Td+ts);c3=Td/(gama*Td+ts); %微分先行算法中的参