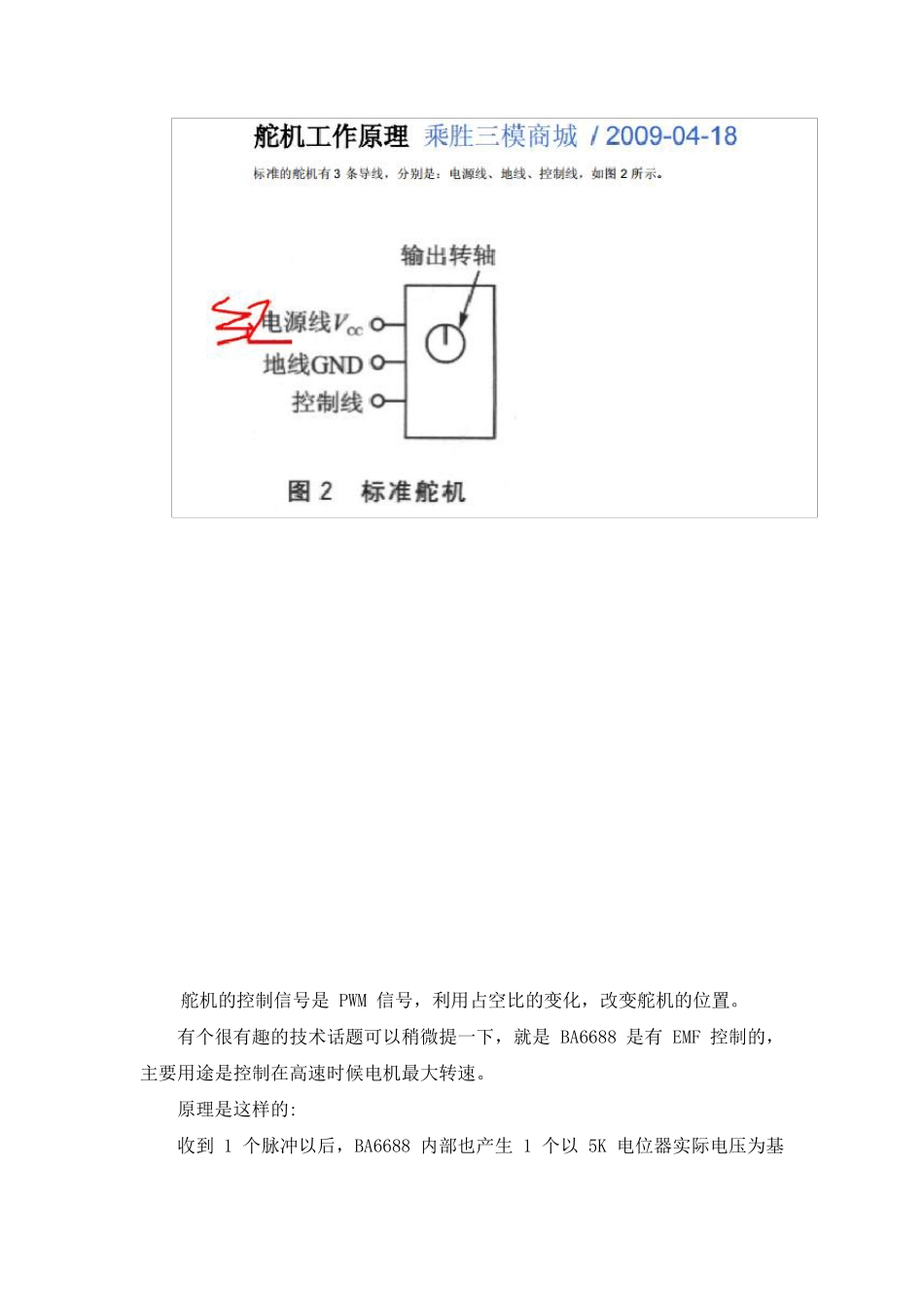
舵机的控制信号是 PWM 信号,利用占空比的变化,改变舵机的位置
有个很有趣的技术话题可以稍微提一下,就是 BA6688 是有 EMF 控制的,主要用途是控制在高速时候电机最大转速
原理是这样的: 收到 1 个脉冲以后,BA6688 内部也产生 1 个以 5K 电位器实际电压为基准的脉冲,2 个脉冲比较以后展宽,输出给驱动使用
当输出足够时候,马达就开始加速,马达就能产生 EMF,这个和转速成正比的
因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来
超过 EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车
这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近)
一些国产便宜舵机用的便宜的芯片,就没有 EMF 控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于 4~6V,一般取 5V
注意,给舵机供电电源应能提供足够的功率
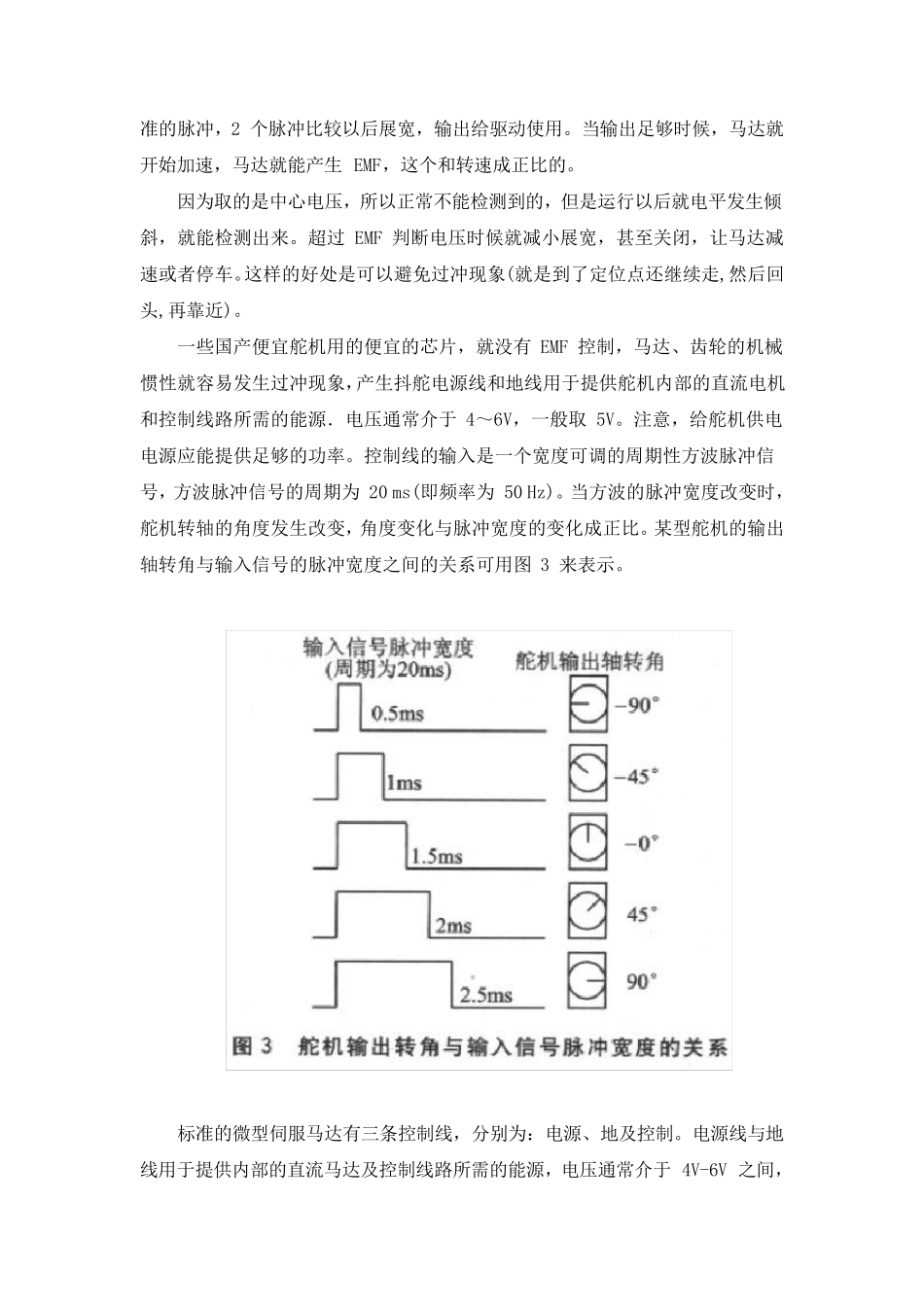
控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为 20 ms(即频率为 50 Hz)
当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比
某 型 舵机的输出轴转角与输入信号的脉冲宽度之 间 的关系 可用图 3 来表 示
标 准的微 型 伺 服 马达有三 条 控制线,分 别 为: 电源、地及 控制
电源线与地线用于提供内部的直流马达及 控制线路所需的能源,电压通常介于 4V-6V 之 间 ,该 电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)
甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理
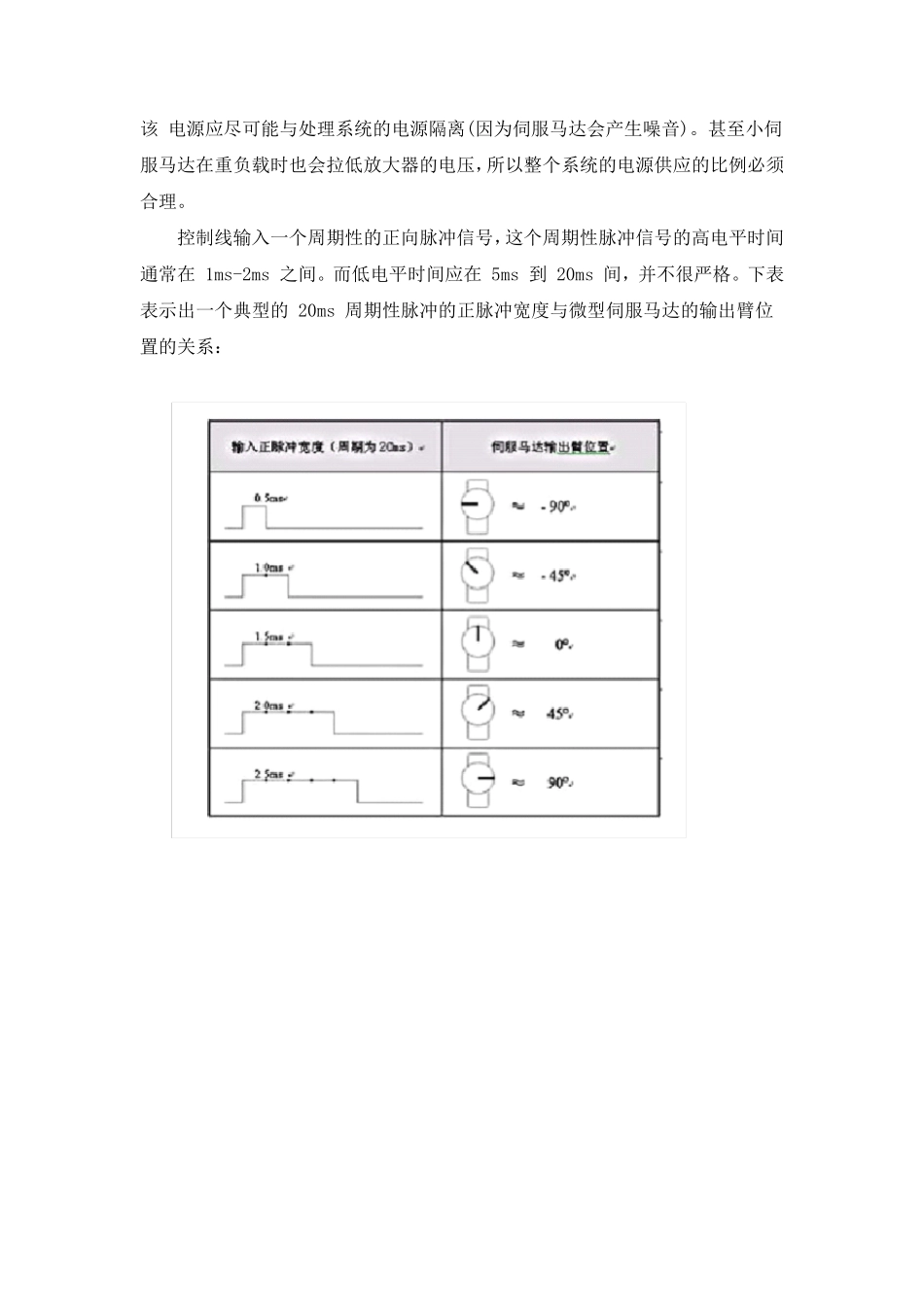
控制线输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在 1ms-2ms 之间
而低电平时间应在 5ms 到 2