附 SVPWM 的仿真实现 1 SVPW M 的基本原理 SPW M 常用于变频调速控制系统,经典的SPW M 控制主要目的是使变频器的输出电压尽量接近正弦波,并未关注输出的电流波形
而矢量控制的最终目的是得到圆形的旋转磁场,这样就要求变频器输出的电流波形接近正弦波
锁定得到圆形的旋转磁场这一目标,SVPW M 控制技术利用逆变器各桥臂开关控制信号的不同组合,使逆变器的输出电压空间矢量的运行轨迹尽可能接近圆形
SVPW M 是从电动机的角度出发,着眼于使电机获得幅值恒定的圆形磁场
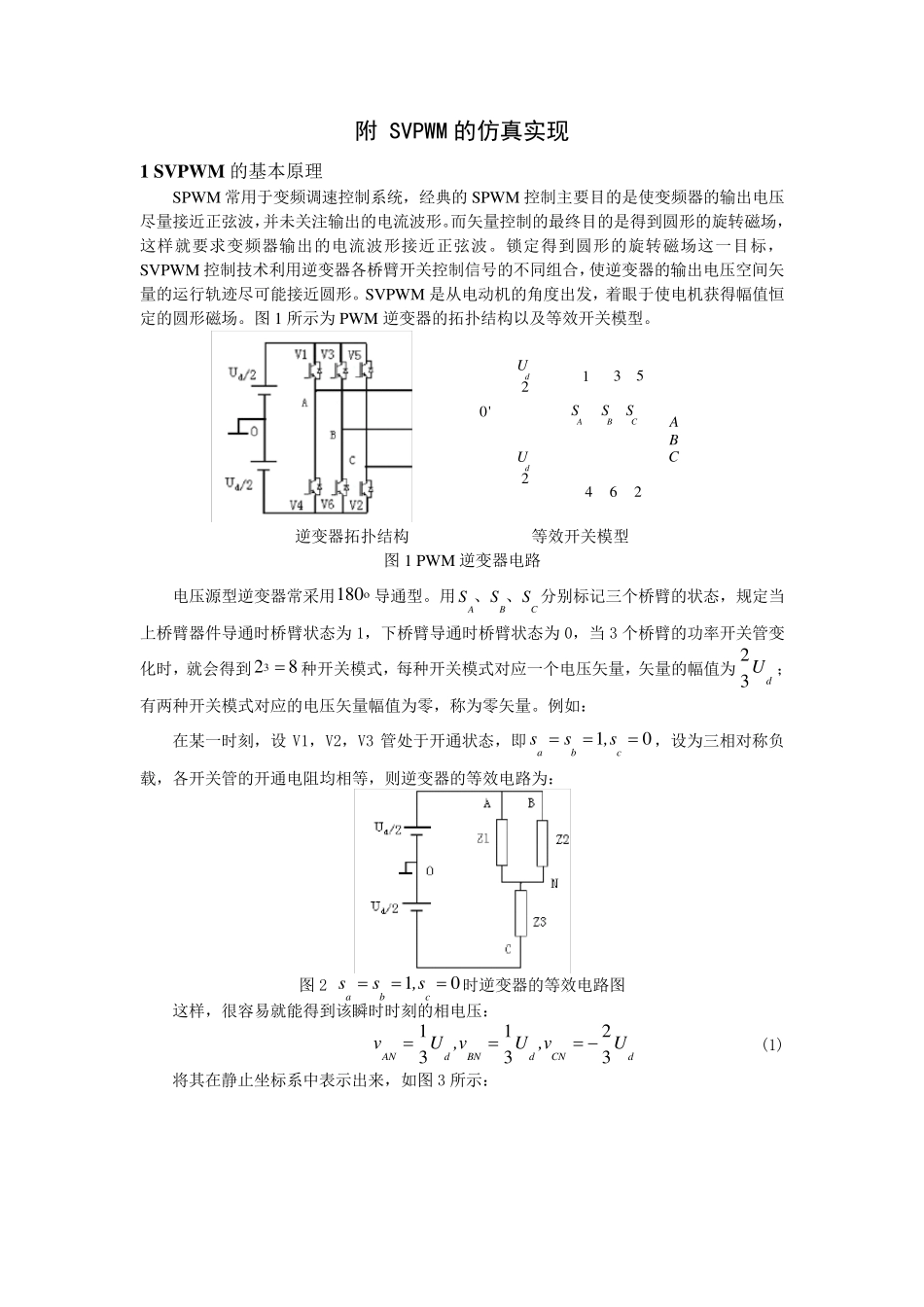
图1 所示为PW M 逆变器的拓扑结构以及等效开关模型
ASBSCS4622dU2dU0'135ABC 逆变器拓扑结构 等效开关模型 图1 PW M 逆变器电路 电压源型逆变器常采用180 导通型
用ABCSSS、、分别标记三个桥臂的状态,规定当上桥臂器件导通时桥臂状态为1,下桥臂导通时桥臂状态为0,当 3 个桥臂的功率开关管变化时,就会得到328种开关模式,每种开关模式对应一个电压矢量,矢量的幅值为23dU ;有两种开关模式对应的电压矢量幅值为零,称为零矢量
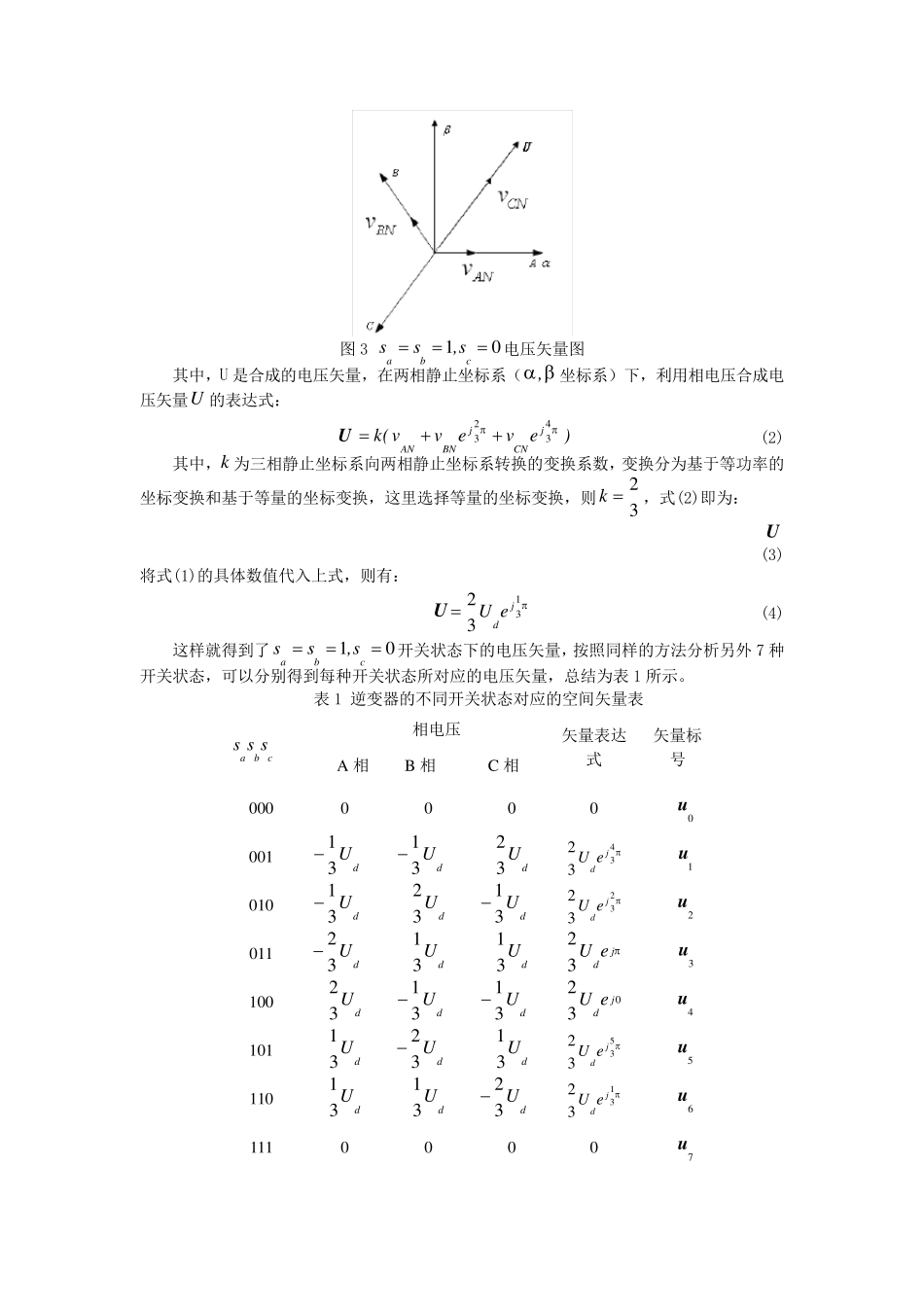
例如: 在某一时刻,设V1,V2,V3 管处于开通状态,即10abcss,s,设为三相对称负载,各开关管的开通电阻均相等,则逆变器的等效电路为: 图2 10abcss,s时逆变器的等效电路图 这样,很容 易 就能得到该 瞬 时时刻的相电压: 112333ANdBNdCNdvU ,vU ,vU (1) 将 其 在静 止 坐 标系中 表 示出来 ,如图3 所示: 图3 10abcss,s电压矢量图 其中,U 是合成的电压矢量,在两相静止坐标系(, 坐标系)下,利用相电压合成电压矢量U 的表达式: U2433jjANBNCNk( vveve) (2) 其中,k 为三相静止坐标系向两相静止