TurtleBot Assembly Instructions68-04568Assembly No
68-04581,Rev
ATurtleBot BOM2ITEM QTYPART NUMBERDESCRIPTION11468-04550-625 6-32x 0
625StarDriveBHCS--BlackOxide2 83168-04539TurtleBotPlate04468-02403-125 Spacer,1/2"OD, #6 ID5168-04548USB toDIN-8Cable6168-05036TurtleBotCargo Bay InterconnectBoard7168-06209KinectUSB and Power Cable8268-04540TurtleBotPlate19 268-04556KinectStandoff10 168-04546KinectSensor11 468-02421-8000 TurtleBotF-F Standoff12 168-04541TurtleBotPlate268-04552-2000 TurtleBotM-F Standoff--2inchNOTE: You will nedd a small flat head screw driver for modifying the kinect
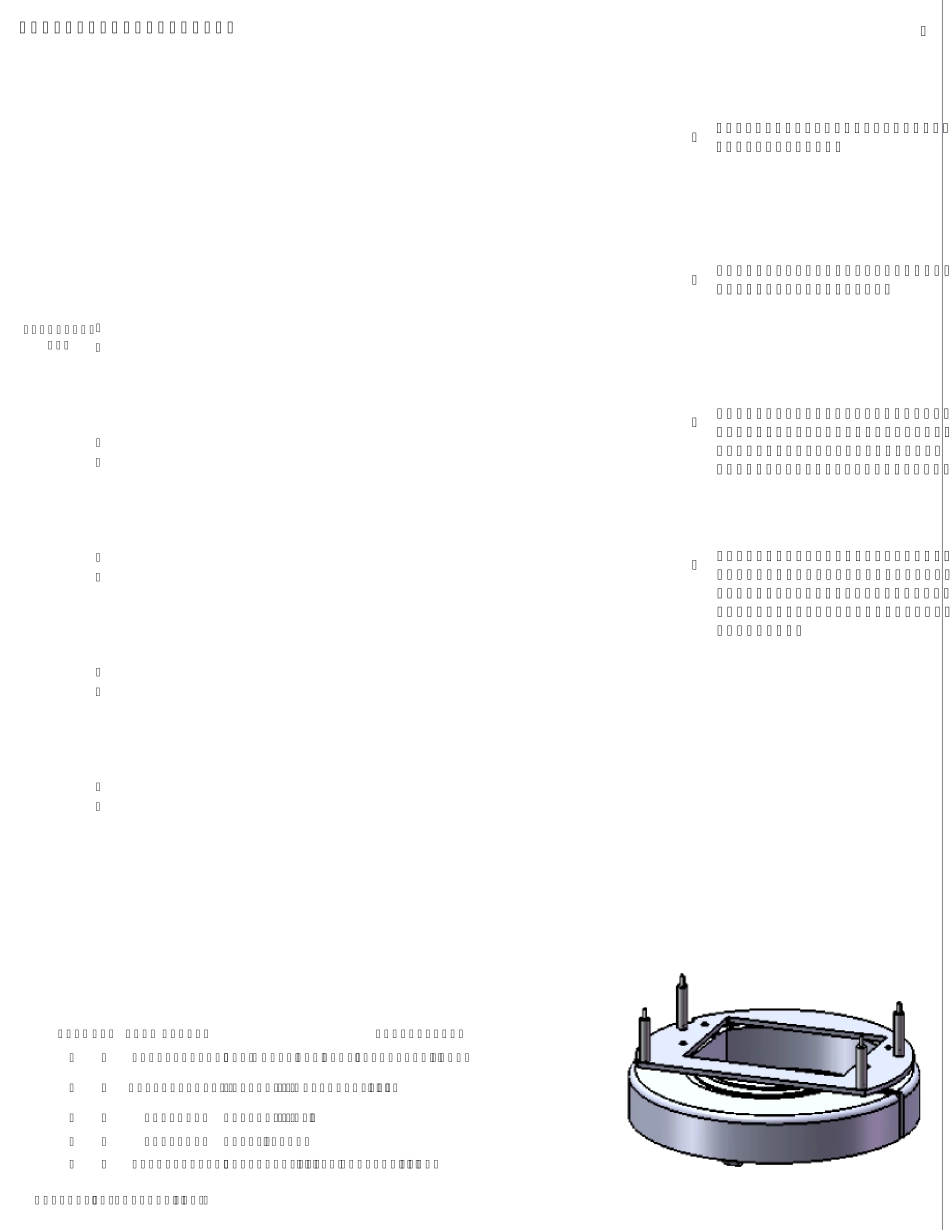
ITEMQTY PART NUMBERDESCRIPTION1868-04550-6256-32x0
625StarDriveBHCS--BlackOxide2468-04552-2000TurtleBotM-FStandoff--2inch3168-04539TurtleBotPlate04168-04545iRobotCreate5468-02403-125Spacer--0
5"OD--#6ID--0