Twincat 操作方法概略 1/15 Twincat 操作方法(概略) 以下简单描述Twincat 的操作方法,以供参考
※若需要阅读 Twincat 的说明书,请在安装 twincat 后,再安装“InfoSys
exe”,即可参考Information System 目录 1
准备工作 (1) LAN 端口的准备 (2) 通信开始的准备 2
从 SystemManager 进行通信 (1) 伺服驱动器的认识方法 (2) SDO 操作 (3) PDO 操作 3
使用 Twincat PLC Control 起动演示程序进行简单的启停动作 1
准备 (1)LAN 端口的准备 ①为了让 TwinCAT 能识别 PC 的LAN 端口,需要在 PC 的LAN 端口安装 EtheCAT 驱动程序
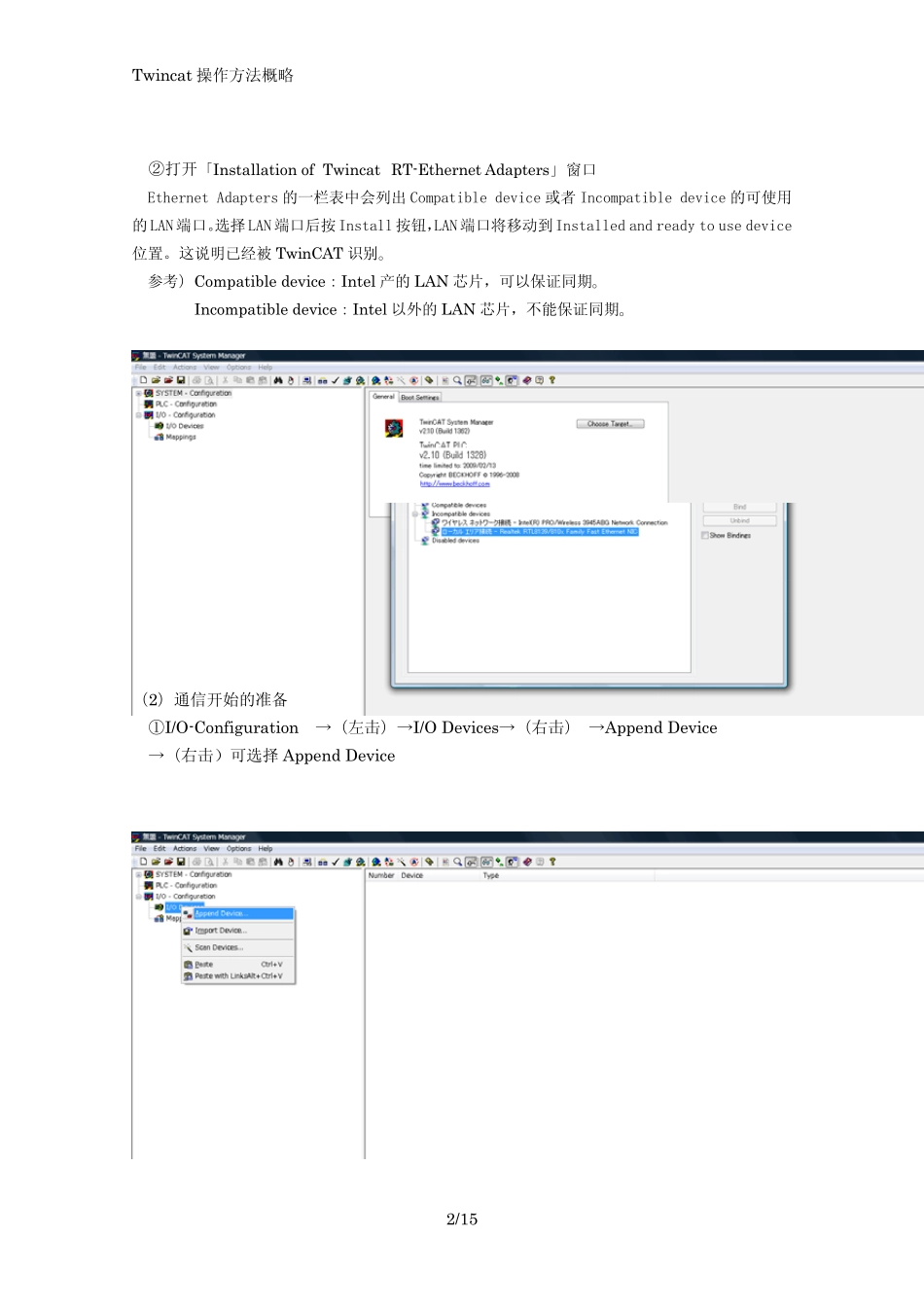
起动 systerm manager 后,[Option]→选择(Show Real Time Ethernet Compatible Device) Tw incat 操作方法概略 2/15 ②打开「Installation of Tw incat RT-Ethernet Adapters」窗口 Ethernet Adapters 的一栏表中会列出Compatible device 或者Incompatible device 的可使用的LAN 端口
选择 LAN 端口后按 Install 按钮,LAN 端口将移动到Installed and ready to use device位置
这说明已经被 Tw inCAT 识别
参考)Compatible device:Intel 产的LAN 芯片,可以保证同期
Incompatible device:Intel 以外的LAN 芯片,不能保证同期
(2)通信开始的准备 ①I/O-Configuration →(左击)→I/O